The Zivid SDK 2.9 SDK preview is now available, delivering next level point cloud quality, exceptional speed, and unparalleled ease-of-use.
Zivid’s latest 2.9 SDK is the most feature-rich Zivid SDK release to date and is a major booster for the Zivid 3D camera product line. This expansive release has a broad range of features that holistically deliver pristine point clouds, and stunningly clean captures on shiny objects, with improved developer workflow and capture speed improvements of 10%.
Oslo, 7th March 2023 – Zivid today announces the immediate availability of its new SDK 2.9 preview release for the Zivid One+ and Zivid Two industrial color 3D camera lineup.
Following Zivid’s successful adoption across a swathe of industries in 2022, many of our customers’ requests for new features have been met in this SDK. The Zivid customer base is considerably broad from piece picking in order fulfillment and parcel handling in logistics, through to classic manufacturing customers in automotive, medical, and aerospace.
Some of the features are beneficial across all industries, some more specialized, but in Zivid SDK 2.9, we believe there is something for everyone.
The most expansive Zivid SDK release to date.

‘This is probably the largest and most significant release of our SDK to date in terms of sheer breadth and quality of the features it contains. We have worked intimately with our customers on their most pressing needs to get their jobs done, and with this SDK, we are giving them exactly what they have asked for.’, says Øyvind Theie, VP of Product at Zivid.
The Zivid SDK 2.9 features are designed to work holistically to benefit customers in three main categories:
- Pristine, complete point clouds.
- Easy evaluation and development.
- Faster, reliable captures.
Pristine point clouds for detection and picking confidence.
Point cloud quality is a top-line item in 3D machine vision. Zivid 3D cameras have best-in-class dimensional trueness of better than 99.8% true point clouds. However, certain objects and scenes present extremely challenging optical artifacts that can prove a challenge to algorithms and software further down the process chain.
These artifacts can create false positives in detection algorithms and obstacles that would be identified as collision points in path-planning software. This SDK has a range of new filter options, including a new cluster and smoothing filter with sophisticated abilities to improve and remove unwanted elements whilst preserving a cleaner, more complete point cloud with preserved edge detail.
Additionally, a new region-of-interest filter allows you to select the area of interest in a scene to keep the focus on the things that matter for your point cloud.
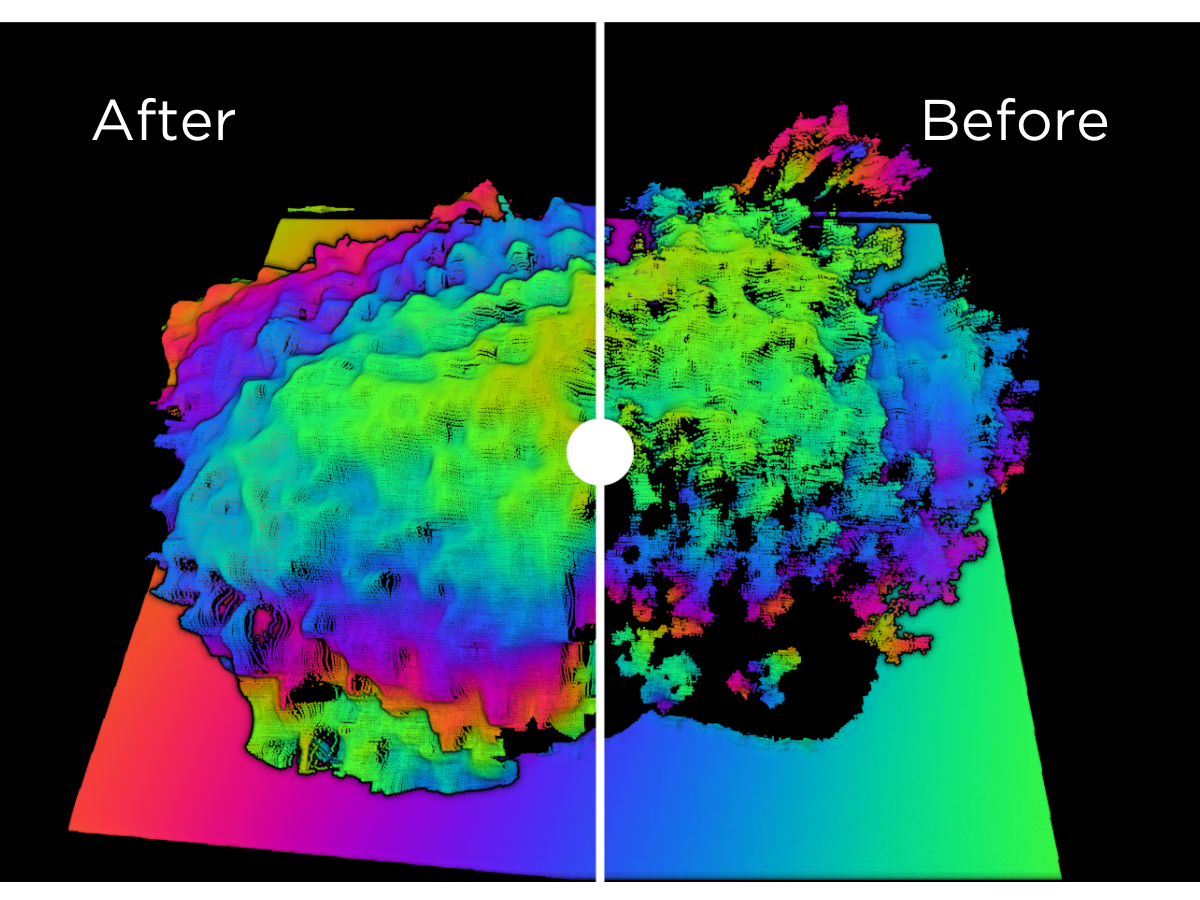
 Figure 1. Example with reflective stamped metal parts
Figure 1. Example with reflective stamped metal parts
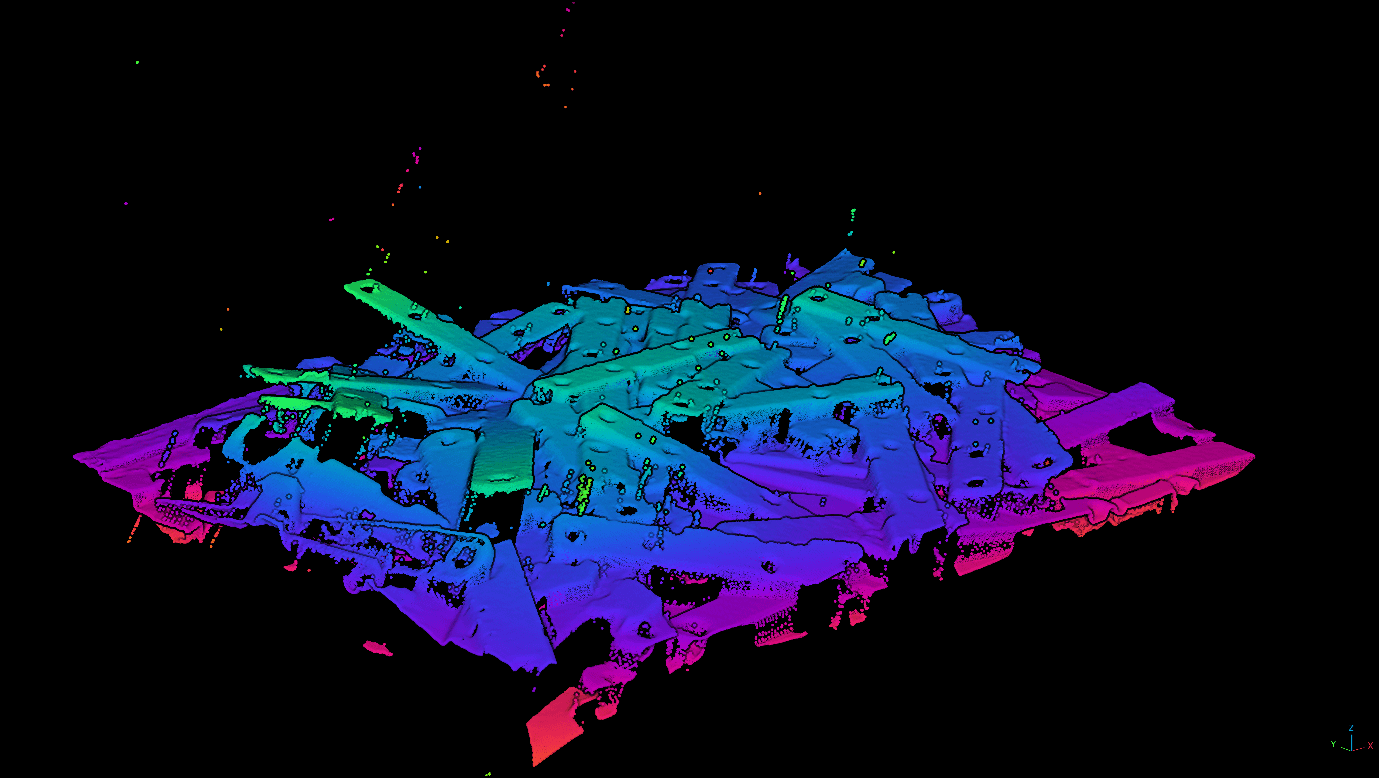 Figure 2. Without Cluster filter, see especially floating points above the objects (depth colored point cloud)
Figure 2. Without Cluster filter, see especially floating points above the objects (depth colored point cloud)
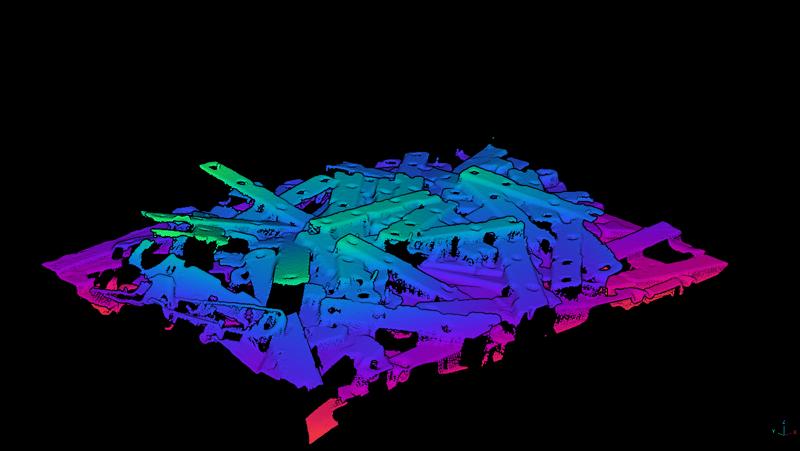 Figure 3. With Cluster filter, point cloud is clean (depth colored point cloud)
Figure 3. With Cluster filter, point cloud is clean (depth colored point cloud)
Easy evaluation and simple development.
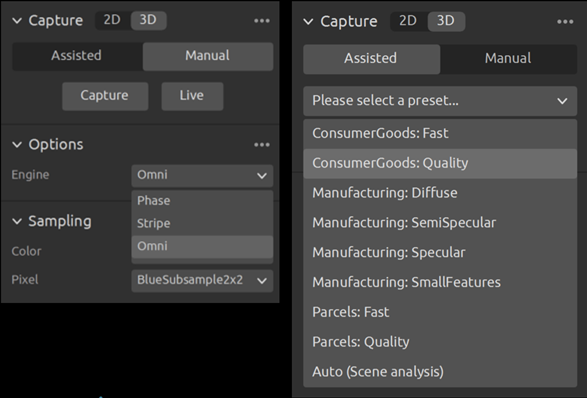
Zivid Studio now offers setting preset options for fast-tracking customer development. With presets, customers can now select from a rich range of object types to select something that closely approximates the objects that they will be working with. This means a full range of settings is delivered off the bat, and fine-tuning can begin immediately. Infield calibration can now be done visually in Zivid Studio via the GUI, which is far better ease-of-use than using solely CLI tools.
10% faster with more flexibility.
We have shaved 10% off the average capture times for all Zivid 3D cameras and benchmarked across a range of GPU hardware. Whilst not a specific feature, this is a benefit of considerable improvements to the overall vision pipeline processing.
Capture speed is always a top-line item for robotics practitioners and integrators. Ideally, the vision system computations should not impede the robot’s productivity. To support this goal, a capture command will return as soon as the camera has completed scanning the scene allowing the user to get faster and better timing control of when the camera is occupied acquiring images.
This simplifies synchronization in larger systems using multiple Zivid cameras, when to move a robot in or out of the scan area, or other 3rd party equipment such as cameras and barcode readers.
For developers, by developers.
There are plenty of new features for developers to make use of in Zivid Studio. As always, Zivid Studio settings map to the Zivid SDK API to make the transition from evaluation to developing seamlessly. A broad range of settings presets are available for customers to kick-start their development with camera settings that will be much closer to the objects they plan to work with. The in-field 3D camera correction tool is integrated into the Zivid Studio GUI in a simplified way, making it easy to check and correct the calibration of the Zivid camera.
At Zivid, we have a ‘developer-first’ ethos. We want our customers to innovate in the most agile way possible. We hear many stories in industry of projects that stall due to unwieldy, hard-to-implement software. That’s not what Zivid is about’, says Joel Stapleton, SVP Engineering, Zivid.
In essence, our core values lie with user simplicity and ease of integration.
‘We have always worked very hard on the developer experience and simple, intuitive workflows for our customers. We are all engineers and developers, and it is core to our beliefs that 3D machine vision should deliver performance through simple use,’ says Theie.
Availability: The Zivid SDK 2.9 is now available for download.
Get your 3D Solution off to a Flying Start with Application Presets

Zivid SDK solves fundamental challenges in 3D machine vision