

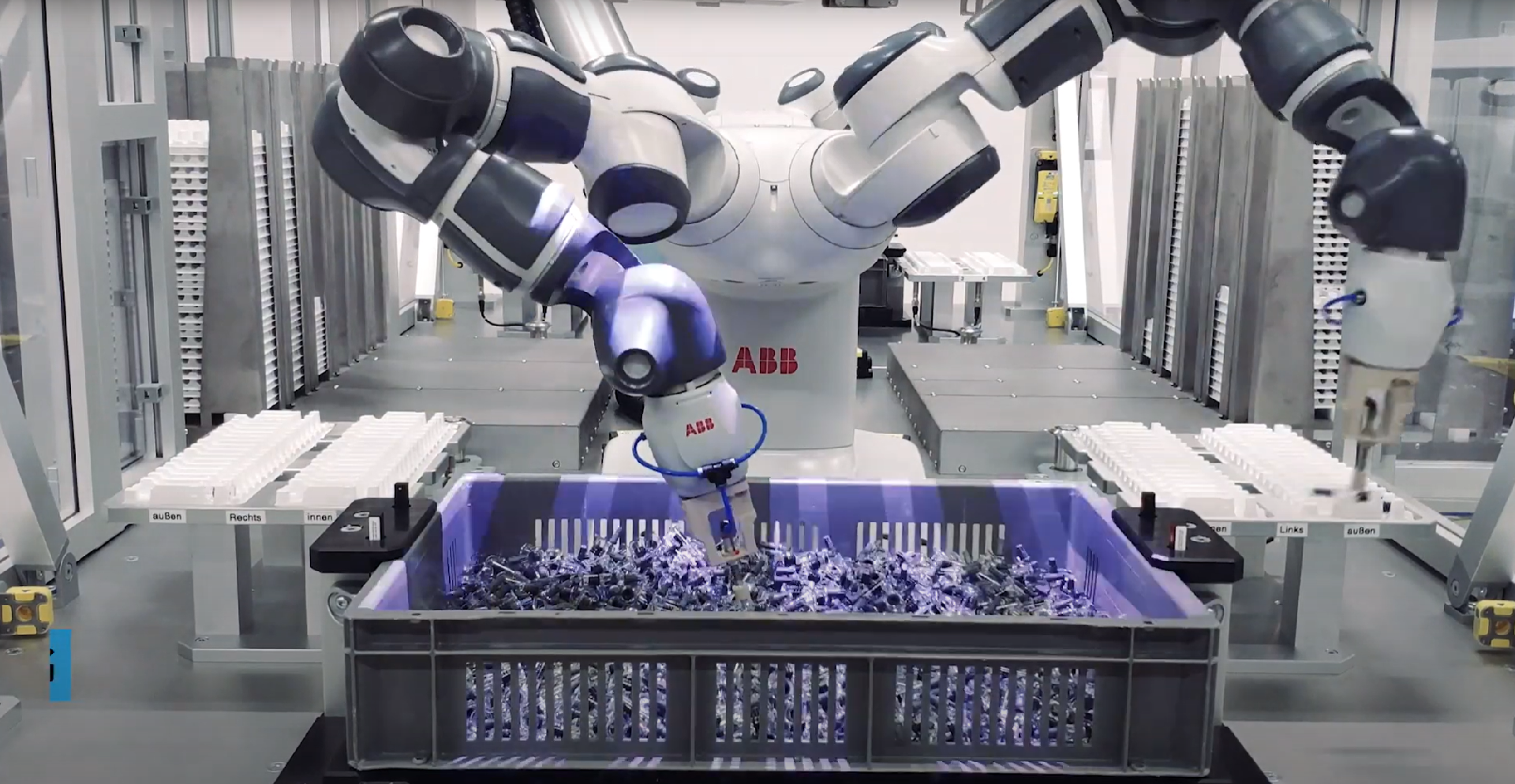
Robotic bin picking is one of the most widespread applications for robots in industry. If you asked the average engineer ‘what is bin picking?’ they likely couldn’t give you an answer. Furthermore, even automation experts often have a different take on what bin picking is really all about and its crucial components. In this article, we will look at the fundamentals of bin-picking and what are the key considerations for choosing the ideal 3D camera for your application.
Table of contents
- What is bin picking?
- Key considerations: what are we picking?
- Zivid 3D cameras for bin picking
- Conclusion

Bin Picking Fundamentals
So, what is bin picking exactly? On the surface it is the routine picking of objects from a container, or ‘bin’ which can vary in size from a few tens of centimeters up to large bins of a meter or more in length. These parts are then placed somewhere else by the robot. It is however, a far less than routine operation when examined more closely, the parts can vary immensely in size, shape, and material.
The placement phase can be a simple drop into another container or a more complex, orderly placement or even a direct placement into another piece of equipment such as a CNC machine. But bin-picking is absolutely cored to manufacturing operations lying at the intersection between component parts and the further machining and assembly in the overall process.

Key considerations: What are we picking?
As mentioned, the scope of the types of parts being picked in these operations is extremely varied. The parts can vary in size, material, and shape, and these are just the basic aspects. This variability is, in large part, the reason that humble bin-picking remains one of the greatest robotic challenges to do effectively and reliably.
Object Size
On the small side, the objects that are being picked could be small screws, nuts, and washers that are maybe several millimeters in diameter. There is a realistic limit to how small a part can be for reliable bin picking, and there are numerous gripping tools designed to do this well, currently a few millimeters in diameter and perhaps a centimeter or more in length.
From here, it goes through to medium-sized parts such as flanges and gear cogs that are tens of centimeters in size, right up to large objects such as camshafts and long tubes that may be a meter or more in length. The ability of the robot to pick very small items will generally be dictated by parameters such as resolutions, accuracy and especially the amount of trueness error present in the system.
Object Material
The material of objects being picked also varies significantly. Metal parts are very common in bin picking operations in manufacturing industries such as automotive, white goods and general product assembly. The object’s material is important in another way to robotics that use 3D machine vision, its level of reflectivity.
Very shiny metallics pose particular challenges when mirror-like surfaces can cause scattering of the scan patterns. Conversely. Very dark absorbent parts such as rubber hoses present a different set of challenges, where no light might be reflected.
Object Shape and Complexity
The third important component is the complexity of the object’s shape. It can affect the detection of the part as well as determining a pick point. A very complex-shaped part may only have one good pick point for the robot, whereas a simpler shape may have more flexibility in terms of a suitable picking point for the robot.
Size of the Bin
Bins come in different sizes and depths; the euro container standard is the most encountered. Your cell may also have to handle different size bins for different parts and jobs. Often the parts in the bin are randomly placed. This is where bin picking is so different from tightly synchronized robotic operations often seen, where everything is in a known set place.
In a situation such as automotive assembly, for example, everything follows a tightly synchronized repeatable pattern, there is very little unpredictability. Bin picking has a great deal of unpredictability and robot movements. This cannot be handled by a pre-programmed system. It must have acute 3D visual capabilities to give the robot the situational awareness it needs to complete the task confidently.


Static or Robot-Mounted 3D Machine Vision
Bin-picking often has a varied set of requirements, one of which is the desired cycle time of the picking operation. For situations where the parts in the bin are in structured positioning, fast cycle times of 5 seconds may be wanted. With random positioning of parts, the picking process and angle of pick will become more complex and probably demand a slightly longer overall cycle time.
Much of this is determined by robot movement and path planning. Robot-mounted 3D machine vision is particularly beneficial when picking randomly arranged parts as it allows total flexibility of capture position, so you can always capture great point clouds. With a stationary-mounted camera, the cycle times could be reduced since the robot does not have to stop to image the scene, the downside being sometimes you might not find the optimal pick point from that static angle.
Either way, Zivid cameras are designed to excel in both scenarios; robot-mounted, or statically mounted. Clearly, the robot-mounted solution makes greater demands of the 3D vision camera, and the Zivid 2+ is designed, built, and tested to accommodate those extra demands with éclat.
%20(8).png?width=500&height=327&name=Free%20eBook%20(1080%20%C3%97%20900px)%20(8).png)
Choose Zivid 2+ 3D Camera for Reliable Bin Picking
Zivid makes industrial color 3D cameras that address several applications. Being able to use one camera provider to cover a variety of solutions simplifies the whole ecosystem.
Zivid provides the cameras and point clouds to tackle a multitude of situations with aplomb. There are many common 3D machine vision challenges across manufacturing tasks where bin-picking plays a role. Some examples are below:
- Assembly
- Machine tending
- Part sorting
- Kitting
The Zivid 2+ product family addresses the needs of these applications perfectly.
 Picking transparent syringes with 3D vision. Read case study
Picking transparent syringes with 3D vision. Read case study
#1 Superb Point Cloud Fidelity
When reliability and productivity is a goal, then it’s important to start with the best data. Zivid offers high-quality, full color point clouds with high-dimension trueness, ensuring that the foundation of your detection and pick poses is at its best.
In some cases, lower-quality data can be handled, for example, when employing a suction gripper that has 5mm of tolerance to pick parts where orientation does not matter. You will find that the more complex and precise the task is you will quickly notice a sharp increase in your data requirements.
Bin picking is mostly about metal parts, picked with steel grippers. Accuracy and precision are key. In this situation, any deviance from reality in how the robot perceives the object will cause an offset in the system. When a metal gripper overshoots and collides with a part it is trying to pick, the results can range from inconvenient to damaging.
Poor data leads to damaged parts, mispicks, and cell downtimes. All of which quickly add up to a hefty sum of thousands of dollars or more, even in the smallest of circumstances.
Zivid’s number one emphasis is delivering the most accurate, pristine point clouds to your picking operation. Zivid’s exceptional trueness quality (the parameter that best defines the ‘true-to-reality’ quality of your point cloud is really the deciding factor between success and failure. It is our Zivid 3D cameras that deliver those astonishingly accurate point clouds to you.
Learn more about dimensional trueness in this online webinar.
#2 All Your Data from a Single Camera
The Zivid 2+ family delivers all the data you require from a single source: 2D images and high-accuracy point clouds. This is not only very cost-effective, but it greatly simplifies software integration with other system elements such as detection and picking algorithms and robot motion planning.
Zivid provides both 2D and 3D data for your system. With full integration of the 2D and 3D, it is easy to correlate locations in the 2D image to the 3D space. This can be applied to 2D detection or barcode reading, for example. Most other 3D cameras do not have fully integrated 2D information, leading to the requirement to buy a separate 2D sensor, design a robust jig for aligning the camera and then a separate 2D to 3D calibration. Having the 2D and 3D integrated into one camera reduces the complexity of the task and decreases the sources of error in your system
#3 Artifact Reduction Technology – ART
Artifact Reduction Technology is Zivid’s unique set of sophisticated tools and filters to help you cope with challenging objects. Often, these are highly reflective and transparent parts. ART is a rich arsenal of tools that includes:
- Project or stripe engine
- Noise filter
- Outlier filter
- Reflection filter
- Contrast distortion
- Gamma filter
ART is supported by all Zivid 3D cameras. All of our cameras have the same codebase, making switching between cameras as easy as plug and play.
Zivid’s upcoming SDK 2.9 will feature a wealth of new features and filters that have particularly strong benefits for bin-picking applications.
#4 High Dynamic Range – HDR
The scenes in bin-picking can often have a broad range of reflectivity, there can be chromed metallic objects that are mirror-like and anodized, dirty, or rusty coverings. It is critical to get good point data across the entire object. This is where Zivid’s high dynamic range (HDR) feature plays a key role. HDR acquisitions to cover the lights, darks, and mids of the scene can be integrated together to form a detailed 2D and 3D image of the object. HDR offers dynamic range captures of greater than 100 dB, which is very close to what is possible with the human eye.
#5 Excelling in a Tough, Industrial Setting
Robots are tough beasts; they live and work in a tough world. 3D cameras are high-precision instruments, designed to be laboratory-grade items of equipment that are capable of measurements down to microns.
At Zivid, we make our 3D cameras to perform in the same tough world as the robot, everything about them is industrial, from the super-strong magnesium housing to the 15 G drop tests we do on them to ensure they make the cut. They are IP65-rated, of course, but their build quality goes way beyond that routine rating.
#6 Made for Deeper Bins
At Zivid, we engage with multiple customers and partners across a broad swath of bin-picking scenarios. Very few installations are the same, and developments and optimizations are always in flow. One thing that started to emerge was that many customers wanted to service deeper bins with longer gripper tools in their bin-picking operations. This was down to several considerations, including the following:
- More efficient path planning of the robot
- Prevent robot/camera collision with the bin walls
- Avoid movement restrictions inside the bin due to the robot arm size and mounted vision system
The Answer to Deeper Bin-Picking: Zivid 2+ L110
Zivid 2+ L110 is the latest 3D camera in the Zivid lineup. It is ideally suited to deep bin picking tasks. It is based on the industry-proven Zivid 2+ camera platform which has demonstrated its consistency and reliability across multiple use-cases from bin picking to welding. The L110 has a farther focus point, giving it a larger working area and volume to be able to reliably cover deep bins from a single point.
If you do not work with a deep bin and long gripper, we also have the Zivid 2+ M60 for you. Zivid 2+ M60 is the classic Zivid 2+ industrial 3D camera, designed to work closer to the bin and can be an ideal solution for smaller, shallower bins.
For more details, here is a specs comparison of L110 and M60:
|
Feature |
Zivid 2+ L110 |
Zivid 2+ M60 |
|
Focus distance |
1100 mm |
600 mm |
|
Recommended working distance |
700 to 1700 mm |
300 to 1100 mm |
|
Resolution |
5.0 Megapixel |
5.0 Megapixel |
|
Point precision |
240 microns |
80 microns |
|
Dimension trueness (true-to-reality) |
< 0.40% |
< 0.20% |
|
HDR |
Yes |
Yes |
|
Omni Engine |
Yes |
Yes |
|
ART |
Yes |
Yes |
|
XYZ + RGB + SNR |
Yes |
Yes |
|
Industrial grade |
IP65 |
IP65 |
To sum up...
Robotic bin picking can appear a straightforward task, but it should not be underestimated in terms of its complexity, and the high precision it demands. It remains one of the most challenging tasks in manufacturing. But when it is done right, it yields great gains in productivity.
Point cloud quality and ‘true-to-reality’ point clouds will determine your success over time. The Zivid 2+ L110 and Zivid 2+ M60 are ideally suited to the bin picking challenge and deliver consistently reliable emptying of deep and shallow bins, respectively. To dive deeper into how to conduct successful bin-picking using Zivid 3D industrial cameras, read our eBook "Solving bin picking challenges with 3D machine vision".
If you are already convinced that Zivid is the right choice for you:

Collaborative robots need flexible 3D vision

Zivid, the 3D vision company that can deliver your 3D camera
