


ABI研究公司指出,2022年将有452,000台机器人出货,与2021年相比,大幅增长65%。环球机器人公司的高级经理Joe Campbell特别预测,"2022年,易于使用的cobot范式将扩展到机器维护之外,并进入复杂的过程应用,如焊接"。 焊接行业正经历着机器人领域中一些最具创新性的增长。
机器人焊接是你能找到的最先进、最复杂、最重的应用之一。越来越多的制造商选择在他们的自动化解决方案中加入3D机器视觉,并提升其性能。凭借视觉敏锐度,机器人可以比人类焊工更准确、更快速地跟踪焊缝。
机器人真的能更好地焊接吗?为了回答这个问题,我们来一起看看什么是机器人焊接,用3D视觉进行机器人焊接的好处,并对给出对视觉引导的焊接的解决方案。最后,我们将给出一些真实的案例研究。

Table of content
- Robotic vs. Manual Welding: what’s the difference?
- What is 3D vision (and why it matters)
- 3 Key benefits of automated welding with 3D vision
- Considerations before choosing your vision sensor for welding
- Robotic Welding with 3D vision: Case studies
- Conclusion
机器人与手工焊接:区别是什么?
什么是焊接?
焊接是一种制造工艺,通过加热、加压或两者结合的方式将两个或多个部件熔合在一起,在部件冷却时形成一个接头。焊接通常用于金属和热塑性塑料,但也可用于木材。完成后的焊接接头可称为焊件。换句话说,焊接是通过将两种材料连接在一起,而不需要任何粘合剂。
有许多焊接的方法。这些工艺可分为两种类型:
- 溶合焊接
- 固态焊接
在这种焊接过程中,连接点是通过施加压力而非热量产生的,这导致要连接的部件发生扩散或表面间的分子融合。这也被称为固态焊接过程。该过程主要用于焊接非铁质薄板金属,特别是铝及其合金。这包括超声波焊接、摩擦焊接、爆炸焊接等。
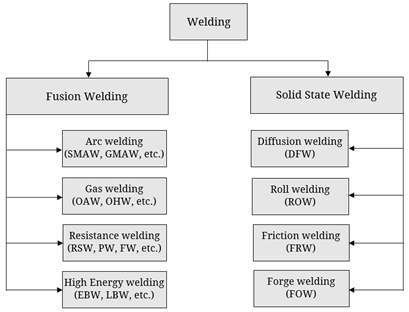 Difference between fusion welding and solid-state welding
Difference between fusion welding and solid-state welding
机器人焊接的兴起
基本上所有行业, 填补技术型手工劳动力短缺变得越来越困难。 迅速培训人员从事低技能和半技能职位变得越来越困难。熟练的学徒培训通常需要三到四年的时间:你不能在几个月内教会人们那些工作。自动化和机器人变得对于保持经济运转至关重要。

也许对于智能机器人需求最为迫切的领域之一就是焊接。与其经验丰富的技术工人面领着严重短缺。几十年前,每个大型团队中可能至少有一个焊工,但现在他们变得非常稀缺,特别是在北美和欧洲
美国大约有45万名焊工,目前缺口为14万。现在,美国焊工的平均年龄是55岁,由于各种原因,下一代焊工的培养存在巨大的空缺。
为什么会出现这种短缺呢? 对于年轻人来说,焊工并不是一个具有吸引力的职业。焊工的中位数工资大约为每年45000美元,比美国平均工资低约5000美元。焊接也是一项艰苦的工作。需要长时间在280摄氏度的高温下工作, 大量的火花,烧伤,必须穿着不舒适的工作服和安全设备工作。焊接工作对于人类来说是脏乱且辛苦的工作。即使是在最理想的情况下,焊工的焊弧时间也仅有50%,而机器人焊工却没有这些限制。
焊接是许多高价值产业的关键组成部分,确保焊接过程在大多数先进经济体中能够顺利进行至关重要。协作机器人(Cobots)已经一段时间与人类焊工并肩工作,以高效和增加效率地协助完成更为基础的任务。事实上,越来越多的知名机器人公司已经响应了对焊接协作机器人的需求。例如,丹麦的大型企业Universal Robot过去一个月一直在推广适用于焊接的UR+产品系列。但现在已经到了一个阶段,机器人需要成为焊工,而不仅仅是助手。
手工焊接与机器人焊接:优缺点
机器人焊接,或自动化焊接,是指利用机械化的可编程工具将两种材料熔合在一起的过程,这些工具能够加热、混合和/或冷却金属材料。一些公司仍然依赖于人工手工操作,但越来越多的制造商转向机器人焊接。
Here are a few benefits of robotic welding and some disadvantages:
| 优点 | 缺点 |
|
焊接质量 自动化工艺和控制器确保焊接的完整性经过精细处理,能够产生一致的结果,实现快速而高质量的焊接。与手工焊接不同,这种自动化过程没有人为错误、疲劳或分心的问题,不会导致缺陷。 |
初始成本 尽管机器人焊接在生产成本上能够节省资金,但自动化设备的初始投资往往相当昂贵。不仅是初始成本高昂,您还必须考虑到维护设备所需的费用。 |
| 减少浪费 当焊接执行不正确时,会导致废弃金属和其他浪费物。由于机器人焊接具有更准确和精密的特点,因此废弃金属和浪费物会减少。 |
技术问题 与任何技术一样,自动化焊接机械可能会遇到技术问题。对于完全依赖机器人焊接的公司来说,如果焊接机械发生故障,可能会导致停工数小时或数天。 |
| 降低生产成本 自动化焊接机械昼夜工作进行各种焊接工艺,所需人力比手工焊接少。这意味着您不需要为生产雇佣额外员工。 此外,您无需考虑劳动力成本,如工伤、病假、员工流失或加班。 |
缺少灵活性 机器人焊接机能够定期执行相同的任务。但如果您需要机器以不同的方式进行焊接或执行其他工艺,就必须重新配置这些机器。通常,这需要额外的时间和费用。 |
| 高产出 机器焊接不依赖人工员工的耐力来完成工作。自动化流程通过比手工焊工更长时间地工作和更快地移动来加速产出。 |
自动化系统对焊接来说总体上更有优势,并且是拯救该行业的必要手段。让机器人执行任务是一个很好的开始,但通过添加3D机器视觉技术,你甚至可以在自动化过程中走得更远。
什么是3D视觉(以及它为什么重要)?
我们生活的世界是一个三维世界。人类看到并处理来自我们眼睛的视觉输入,在我们的大脑中产生对环境的三维理解。因此,如果我们希望机器能够理解和执行人类所能完成的任务,它们也需要像我们一样拥有看到和感知三维空间的能力。出于这个原因,现在行业内对具备这种能力的机器人的需求正在急剧增加。三维视觉系统正在工业、汽车和消费者垂直领域的一系列应用中稳步部署。我们将探讨3D机器视觉技术和系统在自动化、物流和制造领域的应用案例。
.jpg?width=1400&height=788&name=RAMLAB%20WAAM%20Repair%20WELDINGjpg%20(1).jpg)
机器人在制造业和工业中正变得越来越普遍。机器可以执行常规的、肮脏的和危险的任务,从而将人们从这些任务中解脱出来。视觉机器人在一些工业中领域正变得非常流行,如随机装箱、拾取和放置、检查、装配和测量。机器视觉系统通常由五个要素组成。
- 数字成像传感器(CMOS或CCD)
- 光学镜头
- 照明(具体到视觉系统)
- 交流
- 图像处理软件
2D vs. 3D
2D视觉系统已经存在几十年了。这些系统通过提供关键信息帮助机器做出更好的决策,为我们服务得很好。但随着需求的增长,在许多情况下,仅使用2D是不够的,显然需要向3D演进。其中需要这种演进的一个非常典型的例子是对物体进行准确可靠的识别、选择和拾取。这些操作包括若干子类别,其中一些是容器拾取,还有焊接和修理。对于焊接和修理操作,您需要以精确的细节近距离查看您正在制造的零件。
Read more: the basics of 3D machine vision vs. 2D
自动化焊接与3D视觉的三个关键优势
机器视觉在机器人引导应用方面的研究已经应用于焊接领域,并取得了巨大进展。为了使机器人更加灵活和快速,已经添加了用于自适应焊接的传感器,使机器人更加用户友好。
观看网络研讨会 "焊接与3D机器视觉":
1.赋予机器人焊接自主性
机器人焊接在焊接路径轨迹的重复性方面表现良好,因为机器人在有结构的环境中表现出色。然而,与手工焊工相比,机器人无法自行持续修改焊接路径。因此,每当发生变化时,人必须介入并修改机器人的轨迹,这可能会很繁琐。许多中小型企业没有在其设施中使用机器人,因为配置和编程这类设备的过程耗时,并需要领域内高水平的专业知识的工人。
通过使用3D视觉传感器,您可以改进机器人的编程,并赋予其自主所需的能力。增强计算机视觉用于检测和估计待焊接工件的位置和方向,可能通过离线编程的机器人提高焊接过程的效率,同时潜在地降低使用机器人焊接系统所需的能力水平。这将使更多企业能够受益于机器人焊接系统。
2. 使机器人具有适应性
由于工件几何公差以及工件位置和方向的不确定性,所需的焊接路径会因一个工件而异。为了使机器人焊接系统更灵活地处理不同的工件,需要引入外部输入,如计算机视觉。可以使用不同类型的视觉传感器进行焊接。有些可以提供几何控制,而其他一些则可以提供热信息。
特别是使用3D视觉,机器人可以获得对其前方零件的视觉感知,了解其外观和位置。由3D视觉软件驱动的焊接机器人可以在注意到焊接部件排列发生微小变化时,自适应并更改焊接路径。在执行之前,通过3D视觉对焊接路径进行校正,其中3D图像与待焊接工件的CAD模型对齐。这样,焊接机器人更具适应性和自主性。
3. 提高焊接时间
过高估计焊接开弧时间是一个常见的错误。制造业务可能会惊讶地发现,在半自动焊接操作中,平均焊接开弧时间仅为10%到12%。当公司没有考虑如何提高焊接开弧时间时,他们正在错失提高产能和底线的途径。焊接开弧时间直接影响每天离开工厂的零件数量。
前面我们看到,更大的灵活性能使您的解决方案犯更少的错误。因此,您将以更一致的方式更快地制造零件。不再需要润色。通过3D视觉,机器人焊接技术为保持一致的质量和增加无法通过人工焊工实现的开弧时间提供了巨大的可能性。换句话说,如果您完全将焊接过程自动化,并使用机器视觉,您的解决方案的生产力将极大提高
.jpg?width=1728&height=972&name=Robotic%20welding%20blue%20+%20pink%20lighting%201%20(1).jpg)
我们现在知道,将3D机器视觉添加到焊接系统中有许多优势。自动化焊接过程成为可能,使机器人变得灵活而自主,并提高了开弧时间和生产力。
然而,如果您没有选择正确的传感器,启用焊接机器人的机器视觉可能会面临一些挑战。
选择焊接视觉传感器之前需要考虑的因素
1. 高度精确的 3D 捕获
3D点云是由视觉传感器产生现实的数字表示。正是这个点云被用作输入计算如何现实世界中进行的变化。但事实是,所有3D机器视觉传感器都会在数字点云表示中引入错误和不确定性。当这些错误足够大时,您的解决方案可能会出现错误。您希望选择一款在其工作中表现出色,并提供最准确的3D点云,以便实现精确焊接的传感器。
解决方案:
消除不确定性、额外的调整并信任输出的方法就是简单地使用一款具有高点精度和真实形态的工业机器视觉相机。
Zivid Two 工业3D彩色相机以55微米点精度提供细节和真实形态表现,尺寸真实度误差小于0.2%。Zivid的工业3D相机提供2.3百万像素的点云,为您提供数据输出,因此您可以看到所有。
2. 在恶劣环境中工作
焊接是危险的工作,这也是人工焊工难以找到的原因之一。在极端条件下工作,与振动、高温、灰尘和颗粒物接触。在使用3D相机进行机器人焊接时,必须记住传感器将不得不在非常恶劣的环境中工作。如果将相机放置在机器人上并靠近焊缝,即所有摩擦发生的地方,它将更加接近危险。任何未配备设备的机器最终都会因为这种具有挑战性的环境而崩溃。
解决方案:
在焊接过程中,您需要一款工业级的3D相机。关键是获得一款足够强大的3D相机,以进行高精度的弧焊过程,并能够在高温、脏乱和恶劣的环境中平稳运行,设计时具备浮动校准,以保持在环境波动的情况下保持清晰。
3. 靠近焊缝
焊接要求您靠近查看有时仅为毫米大小的细节。许多视觉传感器制造商选择提供适合从远处安装的产品。对于焊接而言,理想的架构是将相机安装在机器人上。这样,它可以看到机器人正在处理的任何东西,并利用机器人的机动性进行多角度捕捉。然而,并非每个相机都适合安装在机器人上。它们通常太重,太笨重,最终只会妨碍机器人的操作。
解决方案:
您的焊接系统需要一款轻巧而小巧的相机,可以安装在机器人的手臂上。当您将3D相机安装在机器人上时,实际上是为机器人提供了在其范围内看到任何物体的自由,并获得了最佳的3D图像质量。
Zivid Two 3D相机专门设计为安装在机器人的手臂上.
4. 复杂的技术需要用户友好型体验
焊接非常复杂,但不少见的是将焊接工艺与其他生产技术相结合。
一个很好的例子是金属丝弧增材制造(WAAM)。WAAM属于直接能源沉积(DED)家族的增材制造,结合了两种生产过程:气体金属弧焊和增材制造。与金属铸造和锻造等传统制造工艺相比,WAAM的存在时间相对较短,但在减少废料、材料广泛可用性、设计自由等方面胜过传统制造工艺和其他DED技术。
这是RAMLAB进行的一项WAAM工艺的示例:
但是,如果您打算在焊接之上使用多种技术,并添加一个具有自己的应用软件和特殊性的3D相机,可能会让您的工作变得更加困难。如果这是一个复杂的产品,有很大可能会遇到一些错误,这可能会令人头痛。您将需要花时间学习如何使用另一个项目,而您的系统已经很复杂。
解决方案:
将任何机器人系统分解成其组成部分,最终将由四个相互关联的功能组成:感知、决策、执行和通信。您需要一种专注于一件事的传感器,那就是感知。许多机器视觉公司正在设计包含应用软件的传感器。在操作焊接过程时,您不应该在其他事务之上再考虑这个问题。您需要一款简单易用、与所有设备兼容的3D相机。
了解为什么Zivid是一家纯粹专注于设计和制造3D相机的公司,我们的目标是帮助您的机器人应用看到一切。
3D视觉的机器人焊接: 案例研究
We have selected for you 2 case studies of robotic welding applications where a Zivid 3D camera has been chosen as the vision sensor.
| Automated Welding and Additive Manufacturing System | Automatic Repair System for Metal Parts |

|
.jpg?width=1400&height=788&name=RAMLAB%20WAAM%20Repair%203d%20scan%20path%20correction%20(1).jpg)
|
总的来说
焊接是工业中最困难的手工任务之一。由于劳动力短缺,越来越多的公司已经意识到是时候用机器人自动化他们的系统了。如果机器人焊接应用具有许多不可否认的优势,但没有视觉传感器,它也有一些局限性。通过添加3D相机,您正在释放焊接应用的潜力。然而,有一些关键考虑因素我们不能忽视:3D相机需要是工业级的,用户友好的,简单的,并且即使安装在机器人上时也具有高质量的3D点云。
For all these reasons, the Zivid Two M70 is ideal for the job. Book some time with one of our experts to learn more about the capabilities of the Zivid 3D cameras for welding applications:
.jpg)
机器人焊接单元选择3D相机时应考虑的 7 个因素

拣选机器人使用3D机器视觉的 5 大优势
%20(Blog%20Banner)%20(4).png)