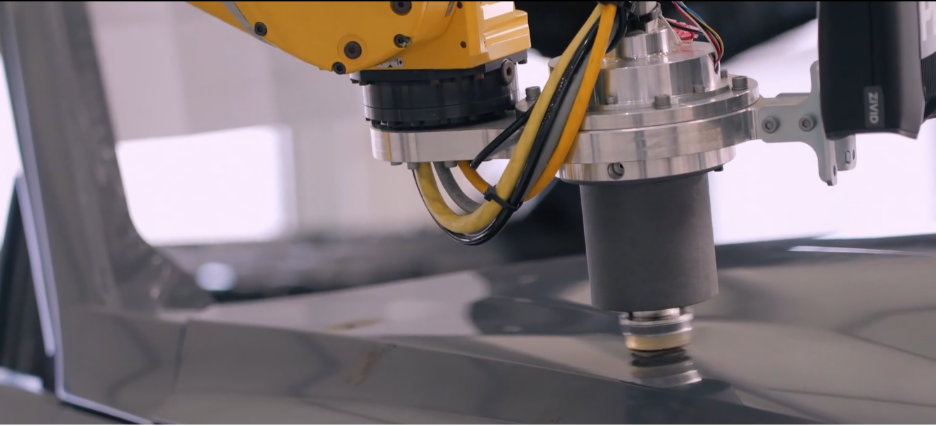
Surface finishing has traditionally been one of the most difficult processes to automate. Unlike welding or material handling, finishing processes such as grinding, polishing, sanding, and deburring involve variability in geometry, material behavior, and required surface quality. For decades, robotic surface finishing worked best in stable, high-volume production. But manufacturing is changing.
Today’s manufacturers increasingly operate in high-mix environments, where product variants, batch sizes, and customization requirements are expanding rapidly. To meet this shift, robotic surface finishing must evolve — and 3D machine vision is emerging as a key enabler.
Table of contents
- What is high-mix production in surface finishing?
- The shift from low-mix, fixture-based automation to flexible production
- Classic challenges for surface finishing robots
- The role of 3D machine vision in high-mix robotic finishing
- From rigid automation to intelligent adaptation
What is high-mix production in surface finishing?
High-mix production refers to manufacturing environments that process a wide variety of part types in relatively low or medium volumes. Instead of producing millions of identical components, manufacturers may run dozens or hundreds of SKUs, each with unique geometries, tolerances, and finishing requirements.
In surface finishing, high mix typically means:
- Different part geometries (castings, weldments, forgings, machined parts)
- Variable edge conditions and surface imperfections
- Frequent changeovers between part families
- Short production runs
- Evolving product designs
Examples include aerospace structural components, Automotive bodywork treatments, EV battery enclosures, metal furniture frames, medical device housings, and custom fabrication work.
The key challenge is variability. Surface finishing is inherently sensitive to geometry. Small changes in contour, edge radius, or weld bead height can dramatically affect tool engagement and surface quality. In high-mix production, this variability is the norm rather than the exception.
The shift from low-mix, fixture-based automation to flexible production

Historically, robotic surface finishing succeeded in low-mix, high-volume environments. These systems were characterized by dedicated fixtures designed for a single part. Parts are presented to the robot in a precisely controlled manner. Robots historically have had fixed treatment programs with little to no flexibility or adaptability. These historical approaches have left customers frustrated with their inability to handle part deformations, part-to-part variability, and end tool wear. The result was that work had to be routed to human operators who could assess parts and carry out the necessary finishing processes, and in the worst cases, had to accept scrap rates that hurt efficiency.
Classic challenges for surface finishing robots
1. Long commissioning times
Because surface finishing involves considerable variation between parts, and sometimes significant variation between batches of the same part, a lot of pre-planning is usually necessary. It usually requires a lot of supporting items of equipment and considerable labor and man-hours to switch and adjust between parts. This can include:
- New fixture design
- Robot path programming
- Testing and iteration
- Process validation
This can take days or weeks per SKU. For manufacturers with frequent new product introductions, commissioning time becomes a bottleneck.
2. Limited scalability
As part families increase, the complexity of managing programs, fixtures, and process documentation grows exponentially. Engineering teams become overwhelmed, and automation loses its economic advantage.
The role of 3D machine vision in high-mix robotic finishing
3D machine vision is a critical enabler of high-mix robotic surface finishing. By allowing robots to perceive and interpret real-world geometry, vision systems bridge the gap between rigid programming and flexible automation.
The role of 3D machine vision in high-mix robotic finishing — summary table
| Capability | What it enables | Key benefits |
|---|---|---|
| Accurate part localization | Captures exact position and orientation; robot adapts to the part rather than forcing precise placement |
|
| Geometry-based path adjustment | Detects edges, weld seams, and surface deviations; compares real geometry to CAD; generates tool paths dynamically |
|
| Faster changeovers | System scans and recognizes new parts; paths derived from CAD; no manual robot teaching required |
|
| Reduced commissioning and re-engineering | Robot adapts to geometry rather than relying on upstream repeatability; minor design changes don't invalidate programs |
|
| Data-driven process control | Advanced 3D vision enables in-line inspection and quality documentation alongside finishing operations |
|
From rigid automation to intelligent adaptation
High-mix production represents a structural shift in manufacturing. The era of single-SKU robotic cells is giving way to adaptable systems capable of handling diverse product portfolios. However, flexibility cannot come at the expense of process stability. Production-ready high-mix finishing cells require careful integration of:
-
Mechanical design
-
Force control
-
Robust software
-
3D machine vision
When properly implemented, 3D vision transforms robotic surface finishing from a rigid, fixture-dependent process into an intelligent, geometry-aware system. The result is not simply automation — but scalable, resilient automation capable of thriving in the variability that defines modern manufacturing.
-1.jpg?width=341&height=192&name=Zivid-Two-on-arm-robotics-3D-vision-color-camera%20(1)-1.jpg)
Zivid wins gold design innovators award for robot-mounted 3D camera
Applications with a Robot-Mounted 3D Camera : 3 Success Stories