

A few weeks ago, we made our SDK 2.9 available in preview. This SDK release is probably our biggest to date and has a wealth of great features that have had a fantastic reception from the public. Well, now I’m delighted to say it is available to download as a full production release, and being the generous souls we are, we even put in some extra great features for you to take advantage of.
As we said in our preview blog, we focused our efforts on features that would bring tangible benefits in development and deployment. We had three focus themes:
- Pristine, detailed point clouds
- Faster, more reliable captures
- Developer simplicity
10% faster right out of the gate
Let’s just brag about this one first. In addition to all the new features we brought to this SDK, we have done a ton of work on improving the whole vision pipeline. Improvements and tweaks here and there that we have benchmarked and seen a general improvement of 10% faster capture times. This is hardware dependent; some platforms offer even more of a speed-up. But it’s a big chunk of time we’re handing back to you.
Hole-filling
This is one of the extra features our team has managed to get into the production release, and it’s a beauty. When obtaining point clouds, it is often necessary to discard points due to noise, anomalies, and other variances. The resulting ‘holes’ that can appear can pose problems for detection and pick pose estimation. Depending on the aggressiveness of your filter settings, we can also see more data loss.
The hole-filling filter isn't simply filling holes but performing some error-corrective magic under the hood. It may not be applicable when a detailed inspection is the goal, but it will reduce capture times in many circumstances by reducing the need for further acquisitions to gather more data on dark and absorptive objects. We have a longer blog on this topic.
Cluster filter
The cluster filter removes stray points usually caused by reflections from shiny and highly reflective objects. Reflections come in various forms, techniques, and filters are needed to address them. What this filter does is identify and remove small groupings of stray points. When enough of these points are present, they can be interpreted as actual objects by motion planning software and may prevent movements and picking accordingly. The cluster filter fixes this, clearing the air, if you will. Learn more→
Smoothing filter
We have significantly improved our Gaussian filter. The filter flattens out any noise across surface planes but maintains a high quality of edge preservation due to our improved 3D weighting of the points. With the new Gaussian, you can expect to get a better 3D edge compared to previous releases, so your features stay sharp and the surfaces smooth. Another plus to this updated Gaussian filter is that it has an improved ripple suppression when dealing with reflections from bin walls as well. All in all, an excellent revamp of one of our classic filters. Learn More→
ROI/Distance filter
Focusing on what you care about is really the story with this one. Often your 3D camera will be looking at an entire bin or working space, and you are pulling in a whole lot of 3D data that you may not be immediately interested in, and of course, it all needs transferring and processing for your detection methods. To allow you the benefit of not wasting computation or confusing your algorithm on data outside of your region of interest, we have introduced two new methods to help you to remove points that are out-of-bounds; one ROI filter based on a box volume and one on a distance range from the 3D camera. A time saver on all fronts.
Learn More→
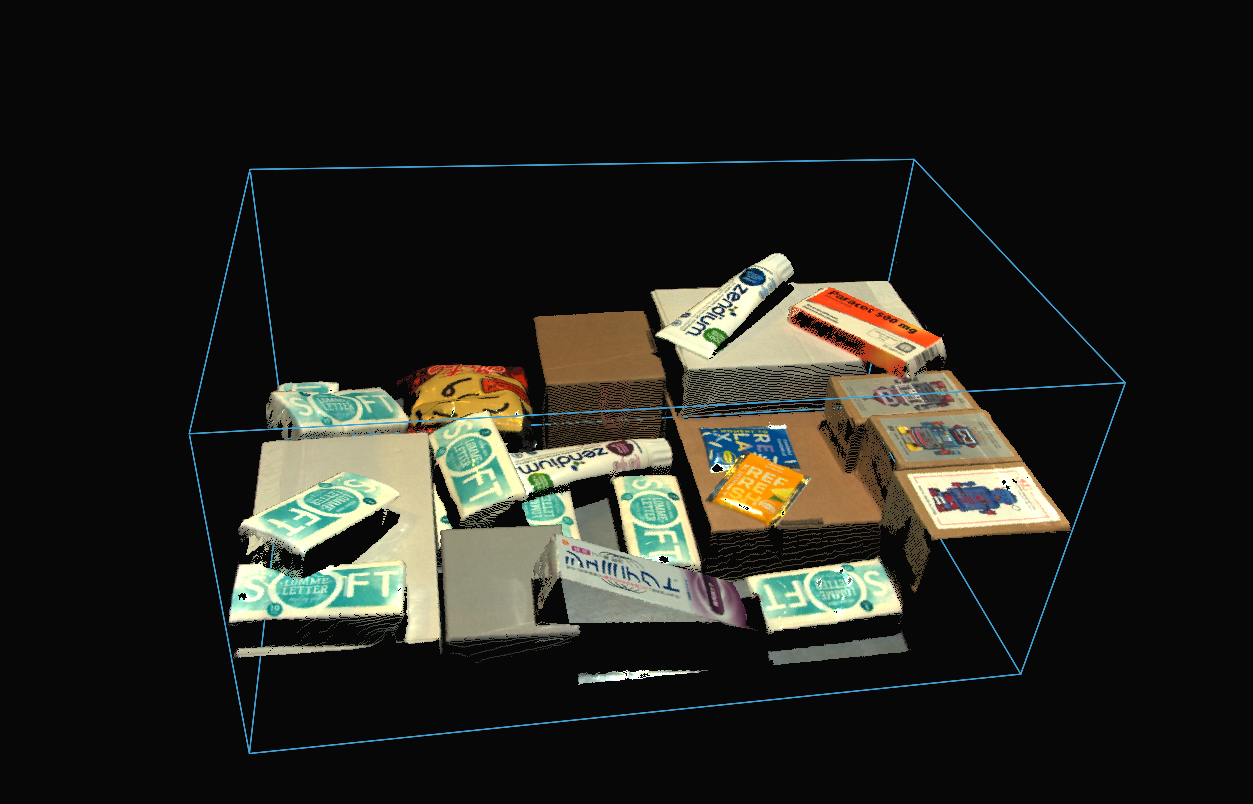 Point cloud with Region of Interest filter
Point cloud with Region of Interest filter
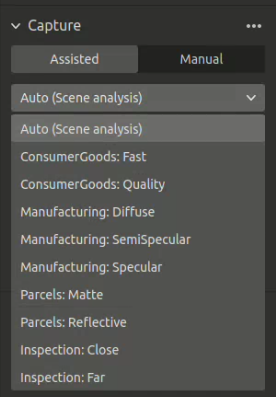
Presets for Zivid camera settings
Everyone likes to make early progress when starting a new project. It fosters confidence and gets the momentum going. We are pretty good at this 3D machine vision stuff, so we’re passing on some of this wisdom with our presets feature in Zivid Studio. What presets enable is for you to select from a list the setting that most resembles your intended scene. So, for example, you might be capturing shiny metallic parts or very dark rubber parts or, maybe there is a very sharp contrast in the scene. You just select the setting that you feel is most similar to what you are working with, and you will hit the ground running. The presets are available for selection in Zivid Studio and are also available using Zivid::Presets in the SDK. Learn more→
Infield correction and verification in Zivid Studio
Another addition to Zivid Studio is performing infield correction directly from Zivid Studio. This is an important operation you should perform regularly to maintain high-fidelity calibration. Now it is super-easy and intuitive straight from Zivid Studio.
Faster with the acquisition complete signal
Now, Camera::capture() returns shortly after the projector has finished pattern projection and the camera has finished making acquisitions. This allows the robot to move again and data transfer and point cloud processing can happen in parallel to the robot being in motion. Another important option this enables is the ability to expose the scene back to back with a different camera, Zivid or otherwise. This results in minimal delay in executing a full scan of your scene. Learn more→
Stay tuned: there’s more to come
All of the features we have focused on this release have been fostered directly by our relationship with our customers. But it would be fair to say that the themes of constantly improving point cloud detail and quality, making captures ever faster to complete, and a ‘just works’ approach to evaluating, developing, and deploying Zivid cameras have an evergreen appeal to our customers. You will be seeing much more like this in the future.
We will also soon back up this release with plenty of new content and code in our knowledge base. For a full overview of all the new information on our knowledge base check out the change log here
Get deeper insights
We’ll be running a developer webinar focusing on SDK 2.9 features and how to get the best from them very soon, so keep checking out our webinar page for more information on this soon.
We’ve had a great reception with this SDK, and our customers are super excited about the new possibilities. Let us know what you are using them for, and tell us what you think, either directly or on our social channels.

Happy developing with Zivid!

Zivid SDK 2.8: Meeting the Need for Speed
.png)
Zivid SDK 2.7: Preserve the Details in your Point Clouds
