

SDK 2.9 introduces processing optimization and improved capture return to make every second count.
One of the main goals when it comes to piece-picking and logistics systems is to minimize the cycle time of the system. Customers expect fast and reliable delivery of their orders. Low cycle times enable logistics picking cells to fulfill orders quickly, which can lead to higher customer satisfaction and repeat business. Each item and each package needs to be found and processed as quickly, and as safely, as possible. Speed is our best friend and dead time is the enemy, which is what makes the upgrades introduced in SDK 2.9 so important. We have a few improvements that have focused on providing faster and more reliable cycle times:
- Generally reduced capture time with 10% speed on Zivid Two
- Improved processing performance on stripe engine
- Capture function now returns as soon as acquisition is complete

Reduced Capture Time
With SDK 2.9 we continue with our mission to give you the lowest cycle times possible while still returning crisp, true-to-life data. In this release we have attacked speed optimization from two different angles: the processing of the point clouds, especially with our stripe engine, which is specially designed to be robust against shiny and specular objects.
The Zivid 2 family has seen the biggest bump in performance. Computers using Intel or Nvidia have benefited from the most recent upgrade, giving us an average of 10% faster across these systems with both the phase and the stripe engines. One thing especially to note is that we now capture approximately 15% faster than SDK 2.8 when using the stripe engine on Intel GPU-based systems. This is helpful for computers that do not have a dedicated GPU but instead rely on integrated GPUs for their processing.
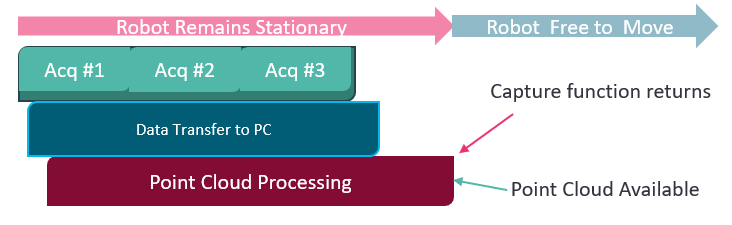
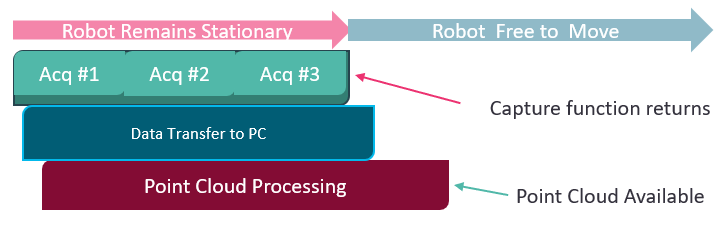
Optimized Capture() Return
To take this from the top, the overall improvement comes across as deceptively simple: the capture function return time now is aligned with when the camera and projector are finished capturing the scene. The moment this process is done, the scene can change, the robot can move, or another camera can illuminate across the same area. In previous SDKs the capture() came at the end of the processing, with some variation due to how different drivers operated on different GPUs. This could cause more variances in the return time and make the cycle time of the automation cell a bit more unpredictable. This update not only improved that predictability but gave back some of the cycle time to be allocated to other operations.
Let's take a look at a few examples we have from our in-house benchmarking of what you can expect in terms of timing going forward:
| Camera/GPU | Zivid Two / Nvidia | Zivid Two / Intel | Zivid One+ / Nvidia | Zivid One + / Intel |
| capture() return 2.9 | 124 ms | 138 ms | 116 ms | 128 ms |
| capture() return 2.8 | 176 ms | 368 ms | 150 ms | 270 ms |
| Time made available | 52 ms | 230 ms | 34 ms | 142 ms |
With the same settings across all cameras, the time gained back can provide ample time to begin a new process, which can accumulate into many more cycles over the course of a working period.
It's easy to see where this newest SDK update with its multitude of improvements that the little (and not so little) things add up to bring a faster, more streamlined experience. With faster captures and more consistent and reliable return times, there is no doubt we can bring smoother and faster operation to all of your projects.
SDK 2.9 is now available for production. Download it here:

Why Integrate 2D, 3D, and Barcode Reading in a Single Camera?

Zivid SDK 2.10: Full Support for the Zivid 2+ and Innovative Features
