

Hi there, Zivid fans! We have some awesome news for you. We just launched SDK 2.12, a fantastic update for our 3D vision cameras.
 |
 |
Key Changes and Improvements of Zivid SDK 2.12
The new Omni engine has an eye-popping performance. Omni v2 offers longer working distance faster with even better point cloud quality, especially on transparent objects.
Here's a run-down of all the great stuff to find in SDK 2.12:
- New Omni Engine v.2, extends working distance and ramps up overall point cloud quality.
- Zivid now runs on Nvidia Jetson Orin modules.
- Updated ROI slashes capture time by up to 400%.
- Upsample/Downsample offers the perfect choice between capture speed and resolution.
- Zivid Studio has a range of new useful features and interface improvements.
- A range of camera settings move out of experimental mode.
- Important! Zivid One+ is no longer supported by this and future SDKs.
We hope you will enjoy using this SDK as much as we have enjoyed creating it! Keep reading to reveal more details about what we’ve been up to this time.
Omni Engine v.2: Sharper Point Clouds Ramp up Working Distance by +20%
Our state-of-the-art 3D technology for capturing transparency has received a major upgrade. Zivid's second version of Omni Engine is bringing us closer to our goal of capturing superb point clouds of anything in the blink of an eye.
Most importantly, Omni v2 brings a significant reduction in point cloud artifacts and errors related to imaging transparent objects which makes it more robust and reliable.
- Over 90% less chance of producing erroneous floating clusters of points.
- Resilience to ambient light has improved.
- Point cloud quality at longer distances has improved, extending the suitable working distance for the Omni engine by 20%.
- Produces sharper point clouds.
- Better point clouds on dark, black, and specular materials.
- Better point clouds on transparent materials.
- Can handle a bigger variety of transparent materials.
Furthermore, Omni v2 can produce these high-quality point clouds approximately 35% faster than before. When running on a high-end GPU the capture time of our recommended presets and configurations has been reduced from 490 ms to about 315 ms. This is made possible because the sensitivity has roughly doubled, which means that the exposure time can be safely cut in half.
.png?width=709&height=398&name=400%25%20speed%20saving%20(3).png)
As mentioned above, we have given the Omni engine a boost which makes it suitable for use at 20% longer working distances. This allows you to work with bigger totes, bins and clearing distances for the robot. For example, with SDK 2.12 we extend the recommended working distance of the Omni for Zivid 2+ M130 from 1.4 to 1.7 meters.

These improvements are reflected in the updated SDK 2.12 presets, which you can activate by selecting the ConsumerGoodsFast preset.


Zivid Now Supports Jetson Orin
More robot and machine vision applications are now being built on the Nvidia Jetson platform. We are delighted to say that you can now run Zivid on NVIDIA Jetson Orin modules in SDK 2.12, bringing state-of-the-art 3D point clouds to edge computing.
This creates fantastic opportunities for future robotic solutions being built on the combination of NVIDIA’s expansion into robotic and AI applications and Zivid’s unique 2D and 3D capture capabilities.
SDK 2.12 supports the full Jetson Orin family, and we have tested the following devices:
- Orin AGX
- Orin NX
- Orin Nano
We recommend that you use a Jetson device with at least 16 GB memory. 3D machine vision applications are memory intensive, and this memory will also be shared by the application code and any AI modeling. With 16 GB or more, we see there is plenty of headroom for even the most demanding applications.
Point Cloud Processing is Faster and Lighter than Ever
There’s been a lot of speed optimization going into SDK 2.12 in addition to the new Omni engine. Here are some of the things that have gotten a facelift:
- The Local Reflection Filter is now up to 15% faster on low-end GPUs
- Color 3D captures on low-end GPUs are now 10-20% faster
- Cropping the point cloud with the Region-Of-Interest filter now discards processing of out-of-bounds points
- Upgraded Region-of-interest (ROI) filter with high bandwidth efficiency.
Upgraded ROI Brings up to 400% Faster Captures
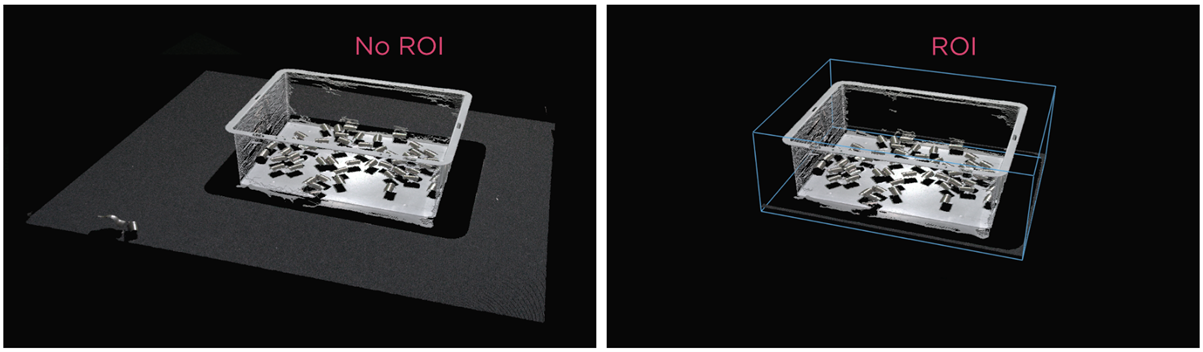 ROI function enables selection in 3 dimensions of areas of importance in the point cloud.
ROI function enables selection in 3 dimensions of areas of importance in the point cloud.
The region of interest filter has numerous options available to developers regarding point cloud resolution by use of the subsampling and downsampling features.
ROI Capture Speed Performance
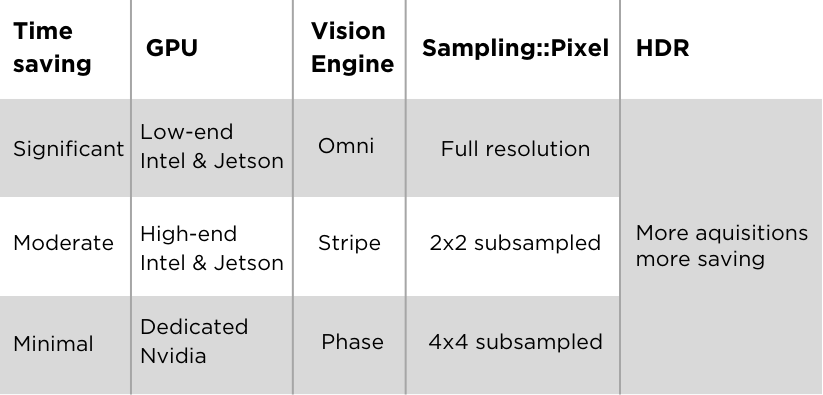
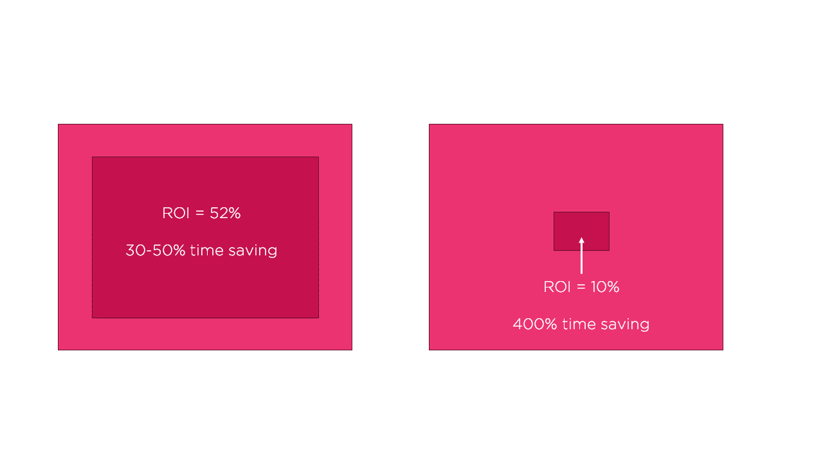
The new Region-Of-Interest filter is super bandwidth efficient and discardes all out-of-bounds points. This potentially makes for really big speed improvements, especially for low-end GPUs.
Capture speed can be reduced depending on how much region of interest is selected. for standard piece picking/bin picking it can be approx. 20% reduction. In certain manufacturing applications such as assembly, it can be slashed by more than 400%.
Upsample and Downsample in 3D and 2D space
With our upsample and downsample functions, you can now independently adjust the resolution of your 2D images and 3D point clouds to optimize your application's processing efficiency while maintaining perfect pixel matching between 2D and 3D data.
This simplifies working with and translating between these data structures. One use case for this feature is when your system is limited by the transfer capabilities of your network.
It is possible to subsample using the 4x4 subsampling setting and then upsample the data once it is on the computer. This will smooth the point cloud but result in a 5MP point cloud again.
Settings Upgraded from Experimental to Stable
A bunch of Zivid camera settings are no longer experimental and have been moved to the API. This includes:
.png?width=806&height=422&name=Subheading%20(4).png)
Note that if you set these particular settings directly in your code, you must update the code to point at the settings’ new location. Settings generated by the Settings.yml files created from earlier SDKs and where the __version__.data field at the top of the file is 23 or lower will continue to work in 2.12.
Later versions will require these settings nodes to reflect their new location, otherwise, you will get an error message saying “YAML document contains unknown key” when you try to load it.
Splash Screen When You Power Your Zivid Camera
There is now a splash screen that will appear for 60 seconds from the 3D camera booting. This splash screen displays useful key camera information:
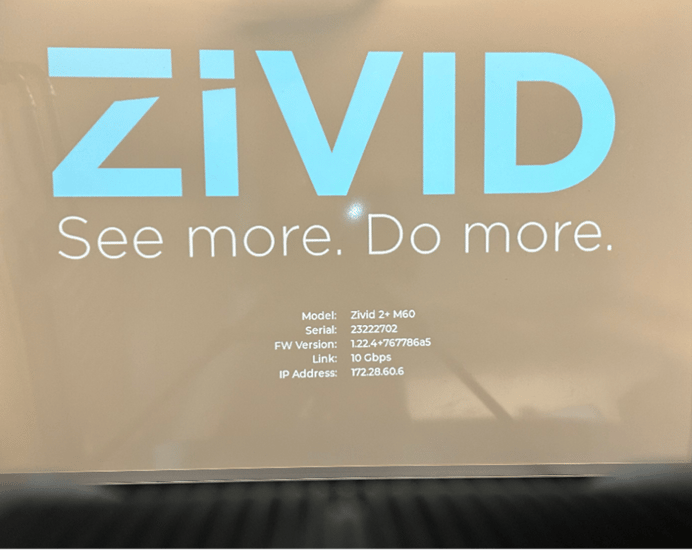
- Camera serial number
- IP address
- Firmware version
- Network link status
The splash screen will disappear after it connects to a camera either in Zivid Studio or via the SDK. It is set to appear by default but can be turned off.
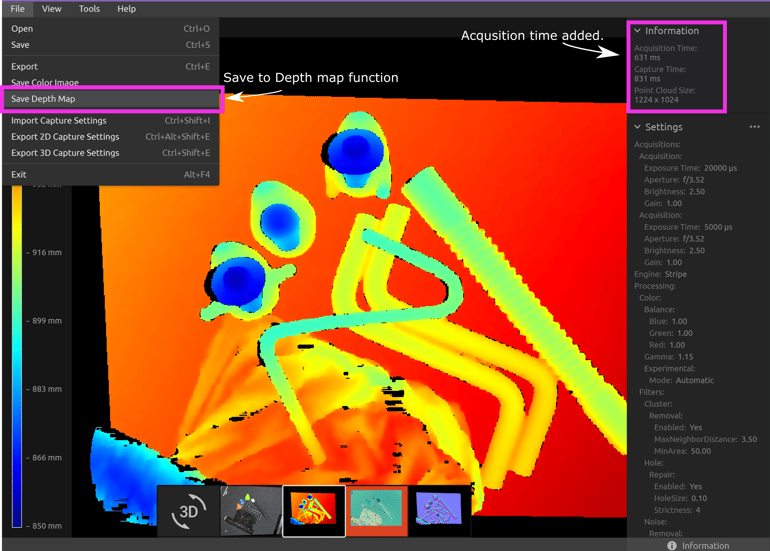
Zivid Studio Continues to Get Better
Zivid Studio provides more data. We have now added acquisition time to the information panel. This shows you how long it took the Zivid camera to acquire all of its images.
This is different from the capture time, which is already in the information panel. The capture time shows how long the total time was from when a capture command was issued until the point cloud was produced and made available for use.
The acquisition time is critical because that is the time when the camera is busy acquiring photons and should remain stationary during this period to get accurate and complete point cloud data.
It is useful to know that the capture() function in the Zivid API will return once the acquisition is done. This means that it is safe to proceed with any work that could have interfered with the Zivid camera.
In addition to this, it is now also possible to save and export images of depth maps.
Zivid One+ Is No Longer Supported as of SDK 2.12
As announced in our previous SDK release, SDK 2.11, Zivid One+ is no longer supported as of this release. This means that you need to continue to use SDK 2.11 if you want to connect and use our Zivid One+ products. With this, we will focus even more on improving and developing our Zivid 2 and 2+ products and future platforms.
Summary
We hope you’ll agree that SDK 2.12 really hits some sweet spots. At the end of the day, what all customers want out of a 3D camera is supreme point cloud quality and completeness, delivered in the very fastest time possible. On these two points, SDK 2.12 is a real killer SDK. For more information on new features, check the changelog. Enjoy, and see you for SDK 2.13!

SDK 2.17: Full Zivid 3 Support and New Barcode Reader

Zivid SDK 2.8: Meeting the Need for Speed
