


这一最新的SDK对我们来说是一个真正的里程碑,因为它代表着工业级别的SDK,以支持我们的旗舰产品Zivid 2+ 3D相机以及我们的新Omni-Engine,我们在现有发布版本中还添加了一些其他功能。我们为能够紧随Zivid 2+相机的推出而发布这个SDK感到自豪。这使得Zivid 2+ M130在实际应用的开发和部署中变得准备就绪。

如果你没有时间阅读整个文章, 可以观看以下发布视频获得最新SDK的介绍
Zivid 2+ 今天正式可供下载
Zivid 全景引擎
新的Zivid Omni-Engine是我们Zivid 2+系列的系统级升级。这是一种全新的3D成像方法,利用了时间结构光,合作了Zivid的所有工程部门。Omni-Engine已经在开发中进行了几年,是我们真正跨学科的努力,并且取得了令人惊叹的成果。
用一个基础的 3D 相机捕获 vs. Zivid 全景引擎
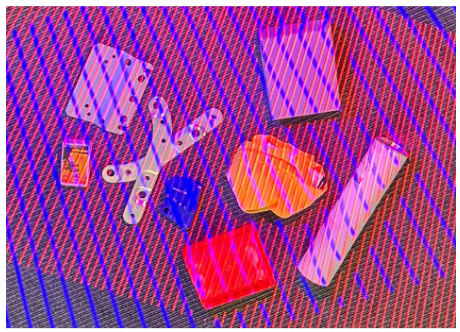
Omni-Engine的诞生是我们与电子商务和单品拣选取领域客户长期沟通的结果。尽管他们提出了许多要求,但关键要求是可以可靠地捕获半透明和透明物体。在透明物体拣选的问题上一直被认为是无法可靠准确完成的任务。但我们总是敢于迎接看似不可能的挑战,毕竟成功属于勇者!
Omni-Engine能够在各种透明物体上提供完整详细的点云数据,同时也在对高度反射物品的捕获上也有着色的结果。所生成的点云完整、详细且清晰,几乎没有虚假点,使得姿态估计、路径规划和避免碰撞估计变得更加直观可靠。
新的马赛克伪影减少算法提高2D图像质量
在这个SDK中,我们添加了一种新的去马赛克算法,与Zivid 2+的500万像素相机搭配使用,可以创造出比以往更高质量的2D图像。该改进能够对比以往更小的2D特征进行分类、检测和识别,比如标签、纹理和一些条形码。通过这项技术,Zivid 2+在拾取和放置操作的所有阶段都提供了工业级2D和3D相机性能,尤其适用于物流和电子商务机器人。对于旧一代的Zivid相机,如Zivid Two和Zivid One+,去马赛克算法保持不变。
之前/之后 使用去马赛克算法
功能齐全适用于 Zivid 2 和 Zivid 2+系列
单色采样模式
Zivid 2和Zivid 2+相机现在支持一种新型的采样技术,您可以选择仅投射和采样红光或蓝光,而不是全白光。我们称之为单色投射和采样。使用这种模式将大大加快捕获时间,因为这种新技术可以有效地对点云进行子采样 - 将点云压缩为其四分之一的大小,从而节省了大量的数据传输和处理时间。使用红色或蓝色单色模式还可以改善对比失真、对环境光和高光的抵抗力,在某些情况下可以在镜面或透明物体上产生更好的结果。这种模式甚至可以同时使用两台相机捕捉同一场景!
您仍然可以在利用单色模式进行3D点云捕获的同时获取全分辨率的2D图像 - 为您的需求提供了一种优化解决方案,对网络带宽、内存和处理需求较少。
 |
 |
红色和蓝色光
定制图像投射
Zivid 3D相机配备了RGB投影仪,现在您可以以创新的方式充分利用它。我们的新投影功能允许您投射自己的内容。您可以在2D中显示图像或视频片段,甚至可以进行3D投影。这不仅为各种有趣的玩法(比如戏弄同事)提供了可能性,还打开了全新的可能性,如视觉反馈、视觉辅助、显示信息等。例如,您可以投射公司标志,照亮机器人应该跟随的路径,突出显示缺陷,或者指向目标。您甚至可以指示Zivid相机拍摄您正在投射的图像。我们相信,这将成为许多应用中非常有用的功能,如机器人导航,或者简单地使机器人单元的安装变得更加容易。
.png?width=600&height=400&name=MicrosoftTeams-image%20(70).png) RAMLAB 用于焊接的定制图案
RAMLAB 用于焊接的定制图案新的噪点抑制和修复选项
在SDK 2.10中,我们扩展了噪点过滤方法,现在包括噪点去除、抑制和修复。噪点去除与您所了解的相同基于我们的3D数据点的SNR或置信值进行去除。新的改进是是引入了噪点抑制和修复功能。打开噪点抑制将得到一个更干净的点云,在物流或电子商务中特别有用,可以在诸如气泡膜和聚袋等特别具有挑战性的材料上提供更可靠的平面拟合性能。
噪点抑制前/噪点抑制后
噪点修复通过使用纠错技术来恢复丢失的点和区域,从而恢复点云,使其更加完整。我们的噪点处理技术以及这些新增功能可以帮助我们的3D相机创建出色的点云,甚至可以捕获更具挑战性的物体,以供您的视觉算法使用。
Zivid Studio 更新
Zivid Studio新的界面
更新的预设设置,带有环境光补偿功能
通过我们最新的发布,我们希望将使用我们的相机更加贴近“即点即拍”的理念。当您现在打开Zivid Studio时,您会发现在首次捕获点云时进行了一些重新布局。以前,我们默认直接使用捕获助手,除非另有说明。现在,您需要从预设设置列表中进行选择,或选择捕获助手作为您的首选方法。
在这些预设中,我们还为所有预设实现了环境光适应功能。当您在场景中看到由您所在地区电网的频率引起的涟漪时,无论是50Hz还是60Hz,这个设置就会非常有用。通过以与您的电网相同的间隔捕获,可以消除这些涟漪对场景造成的影响。这尤其在仓库或具有荧光灯、卤素灯或白炽灯照明的环境中很常见。
在使用您的新Zivid 2+时,请记住一个重要事项!Zivid 2+ M130的默认3D捕获方法是使用上面提到的蓝色采样。如果您想获得一个5MP的点云,请确保将其更改为RGB。
Zivid Studio现在可独立进行2D捕获
虽然Zivid制造3D相机,但我们知道我们的2D数据同样重要。在这个版本中,我们希望为用户更容易地找到适合其项目的最佳2D捕获设置。升级后的图形用户界面(GUI)使得测试和创建适合您场景的完美2D捕获设置更加快速和便捷。
总结...
Zivid 2+家族推出了三款全新的3D相机,这对我们来说是一个真正的里程碑,它们在透明物体等其他捕获较为困难的物体上展现了机器视觉领域的真正进步。我们希望确保整个Zivid生态系统始终与我们的新相机发布一同不断发展,以便您可以尝试我们的所有新功能。所有新产品都需要由稳健的、生产级的软件支持,我们很高兴在产品发布后如此短的时间内就能实现这一点,即SDK 2.10。享受我们最新SDK的体验,开始让不可能变为可能。
Share this
Zivid 发布 Zivid 2 L100 工业级 3D 相机专为更深的料箱物料抓取
.png)
Zivid 发布 Zivid 2 L100 工业级 3D 相机专为更深的料箱物料抓取
2022-10-05
1
min read
Zivid 2+ 3D 相机专为高速可靠拣选所有库存商品而设计,攻克透明物品拣选难题。
%20(1).png)
Zivid 2+ 3D 相机专为高速可靠拣选所有库存商品而设计,攻克透明物品拣选难题。
2023-06-01
1
min read
如何使用Zivid 3D视觉的单色采样来加快周期时间
如何使用Zivid 3D视觉的单色采样来加快周期时间
2023-09-19
2
min read