



使用单色采样可实现5倍更快的捕捉速度
这项功能是减少捕获时间的主要推动因素,事实上,它使捕捉速度提高了最多五倍。当使用单色采样模式时,点云大小会压缩4倍。这种压缩提供了类似的点云质量,但具有更快的点云处理优势。在工业应用中,这是一个主要优势,因为这些应用对周期时间有更严格的要求。
高灵活性投影仪
Zivid 2 和 2+ 3D照像机系列配备了强大、动态和适应性强的投影系统。我们新增的一个功能是,您可以指定要投影和采样的颜色。新的投影颜色模式只使用蓝光或红光,除了我们已经有的白光。通过利用新的红光或蓝光投影模式,现在可以从仅对特定颜色波长进行采样中获得大幅的时间节省。在不同模式之间切换不会带来时间损失。
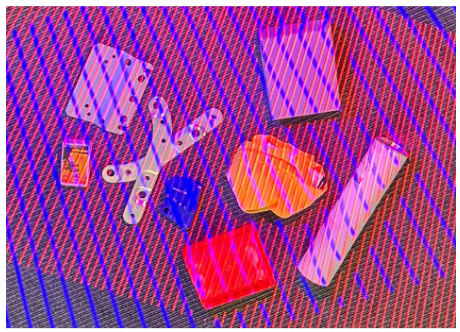
Fig. 2 对一系列物品进行单色投影
(2 x Zivid 3D 具有1个红色图案和1个蓝色图案的照相机)
3D + 2D 统一数据
所有Zivid 3D照像机的真正优势在于,所有照相机数据都以逐像素的方式提供。这意味着每组数据都独立关联到其原始像素,每个像素的数据如下:
- 2D data (RGB)
- 3D data (XYZ)
- Depth map data
- Surface normals data
- Signal-to-noise ratio (SNR)
这种统一的逐像素数据格式更容易处理,意味着无需进行内在或外在校准来对齐正在使用的不同数据。
当我们进行单色采样时,只需选择感兴趣的像素:红色、蓝色或白色,并丢弃其他像素。
多个相机的可能性
使用单色光投影的一个不错的特点是能够同时在两个不同的色频上操作多个摄像头,实现双重同时捕捉
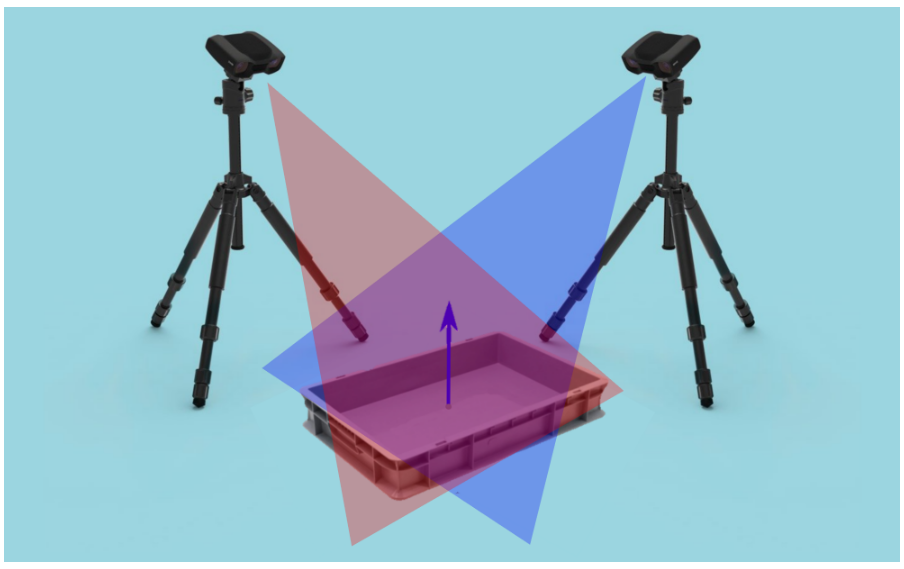
Fig. 3使用两台Zivid 3D照相机和红色和蓝色光源进行双重捕捉的应用
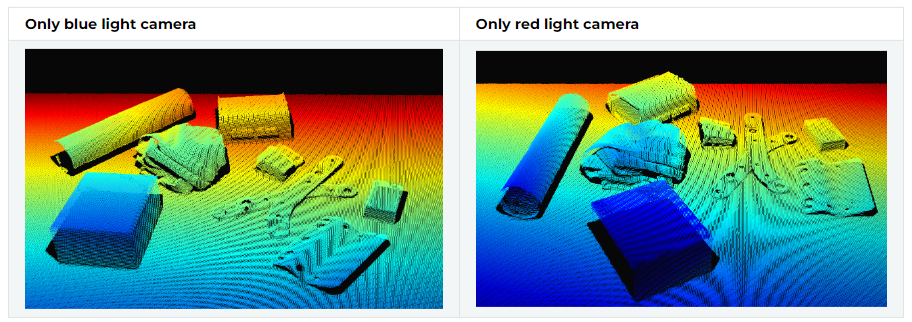
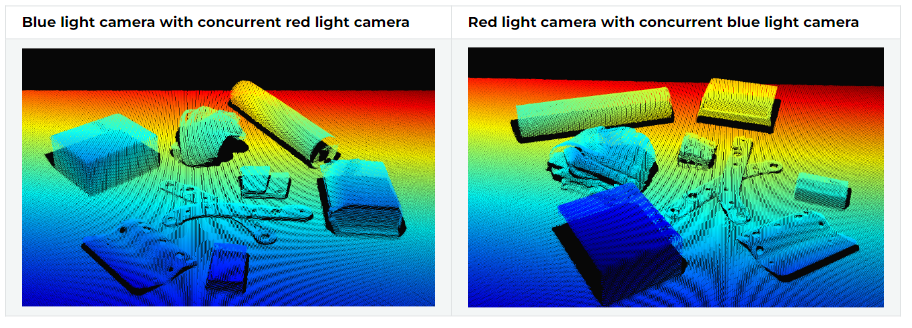
Fig. 4仅使用单色和双重单色获取的点云
单色功能使用红色或蓝色光,它们位于可见光谱的两端,具有非常明显的分离,如图5所示。这意味着LED光源的这两种颜色之间几乎没有串扰。
这使得两台Zivid 3D照相机可以在相同的情境中工作,每台照相机机都可以轻松过滤掉另一台照相机的光源。
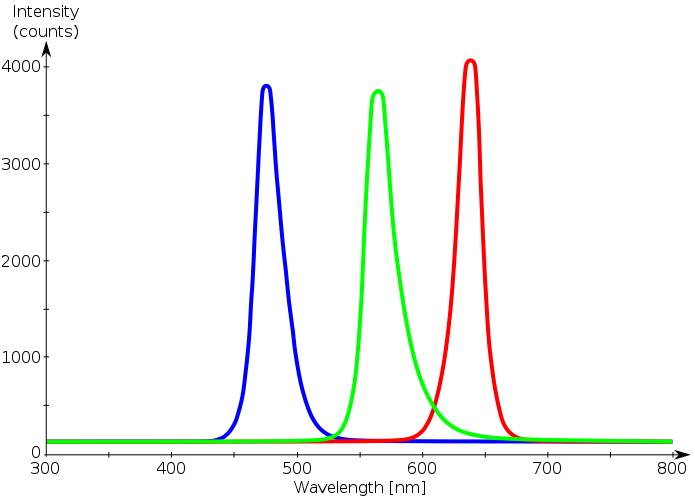
Fig. 5 红光、绿光和蓝光的频谱特征
相同的高精度校准
独特的Zivid校准系统被设计用于处理所有校准工作,无论是使用单色采样还是白光。它被设计成无需额外工作即可保持的校准状态。
更好抵抗环境光的能力
使用单色采样还具有更好抵抗环境光能力的优点。红色和蓝色的滤波器明显比绿色的窄,这有助于减少总体噪点。可见光主要由绿色构成,通过能够过滤掉这部分绿光,降低了噪点并提高了动态范围。
混合和匹配2D和3D数据以满足需求
在SDK 2.10中,借助这一功能,您可以根据最适合您的应用的方式进行2D和3D捕获。例如,您可以从以下选项中进行选择:
- 仅3D捕捉(无2D,无彩色)。
- 3D捕捉中的2D + 3D(完整RGB点云)。
- 2D图像全分辨率 + 3D采样(RGB点云)。
- 2D图像全分辨率 + 3D采样(蓝色或红色单色点云)。
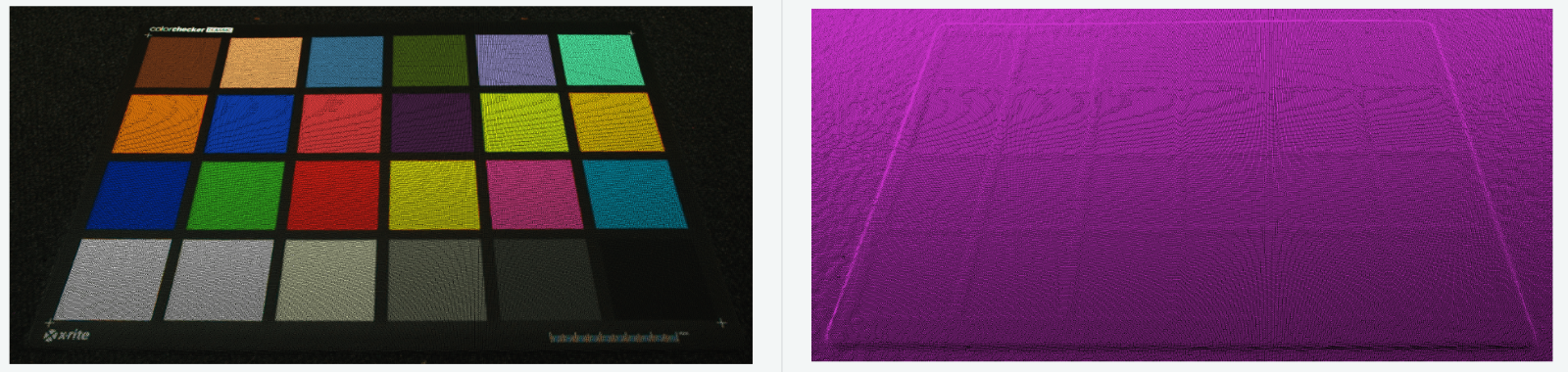
Fig.6 全彩色点云和单色点云 (在Zivid Studio中呈现为粉色)
总结
有了这种灵活性,您可以在检测算法中使用最高质量的2D数据,优化3D数据,并在不损失点云质量的情况下实现更快(最多5倍)的总捕捉时间。能够使用单色模式带来更好的环境光抵抗能力,并常常提高了总体动态范围。这在制造领域特别有益,因为彩色点云的需求很少,但需要获得最快的捕捉速度和机器人循环时间是首要任务。
如果您想深入了解单色采样,请查看在知识库的文章
立即通过与我们经验丰富的3D视觉团队预订演示,体验独特的Zivid 2+优势:


SDK 2.11: 简单网络和流程优化以提升速度

为什么低端3D技术正在损害您的机器人货品拣选权限?
