时间在工业生产中是十分宝贵的, 花费大量时间结果却不尽如人意往往代价高昂并且令人沮丧。虽然3D 视觉的原理十分复杂 , 但是实现您的意愿是完全有可能.
在Zivid 我们认为3D相机应该遵循家用电器的运作理念。 它们确实是非常敏感、复杂和高度校准的设备,但这种复杂性不应该让用户感到困惑或难以操作,因此易用性和出色的用户体验应该融入它们的设计中。
Table of contents

将 3D 机器视觉简单化
将3D机器视觉系统投入运行有时候会带来很多问题。有许多因素需要考虑。当初次使用新的3D传感器或照相机时,可能会感到不知所措,因为与数码单反相机等设备相比,3D相机没有标准化的接口格式。
在机器视觉领域,不太可能很快出现行业统一的接口,因此在此期间,我们在Zivid的工作是尽可能地使其变得简单。通过我们引入的应用程序预设,我们为您提供了一种可以快速接近您工业应用中希望捕获到的内容。
我们为什么引入应用预设功能
许多使用3D照相机进行开发的人可能不是机器视觉或计算机视觉的专家,此外,我们与之合作的许多客户都是多学科工程师或开发人员,他们迫切的想要组建一个可行的系统。因此他们需要扮演多重角色来推动项目,会被要求在短时间内成为所有领域的专家,因为能够快速启动3D照相机并在短时间内获得出色的结果非常重要。
当然,您仍然希望有进一步微调的选项,以获得捕捉的最后几个百分点的质量,而Zivid提供了这个选项。但在大多数情况下,这些预设应该在首次尝试时为您的应用程序和对象类型提供非常高质量的结果。
应用预设功能是如何运作的
预设功能可以总结为以下几种常见的类别
- 消费品
- 包裹
- 工业
- 检测
此外, 每个类别都有优化其质量或速度的选项,并且都具有适应50Hz或60Hz照明的环境光功能。
预设功能非常简单和直观,只需要三个步骤:
- 选择应用类别
- 选择最佳捕获质量或者最快捕获速度
- 选择投影模式
如果您想获取更多技术方面的知识并且查看代码库或者基准测试结果,可以访问我们的知识库预设页面
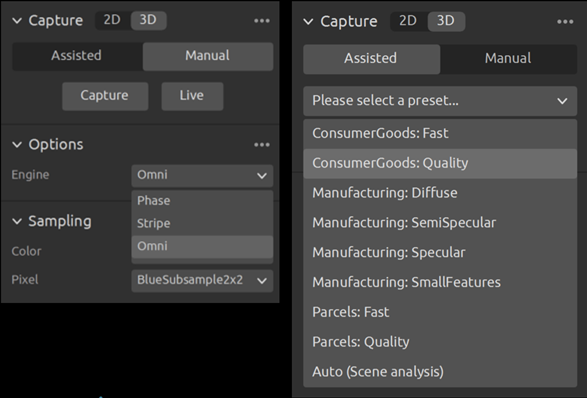
简单直观的预设程序选择页面
预设简介
预设: 消费品 涵盖了一个订单履约中心单品拣选应用中涵盖的所有不同种类,不同形状材质和颜色的SKUs (Stock Keeping Units)物品。 在这种情况下,速度是一个关键的考虑因素,捕获时间通常预计在300毫秒到1000毫秒之间,取决于点云质量要求。 在这种应用中,点云的完整性和尽可能多的数据点将被优先考虑,而不是精确度非常高但数量较少的数据点。这是因为检测物品及其位置至关重要,然后会被一个吸盘末端执行器进行拾取。
支持Zivid 3D 相机:
设置: 快速 这是用于在绝对需要速度的情况下,优先级高于一切其他因素的情况。

典型的消费品场景: 速度优先的情况下捕获
设置: 质量 这是用于当有更多时间,但仍必须保持快速,并且更丰富、更准确的点云的情况下使用的。

典型的消费品场景: 质量优先情况下捕获
预设: 包裹 针对通常在物流中心遇到的所有物品。这些包括箱子、塑料袋和包裹。这是一个高速环境,捕捉时间预计在200毫秒到400毫秒内完成。同样,在绝对点云准确度和精确度之上,完整的点云而没有孔和缺失区域是最重要的。
支持Zivid 3D 相机:
设置: 快速/平整 适用于物品均匀且容易获得3D数据的场景,例如棕色纸板箱

包裹场景: 快速/平整设置下捕获的点云
设置: 质量这适用于更具挑战性和多样化的待拾取物品,例如黑色塑料袋和深色、反光的包裹

包裹场景: 质量/反射设置下捕获的点云
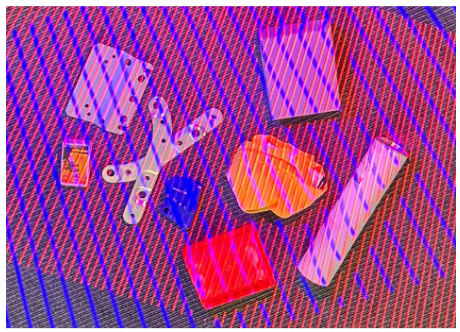
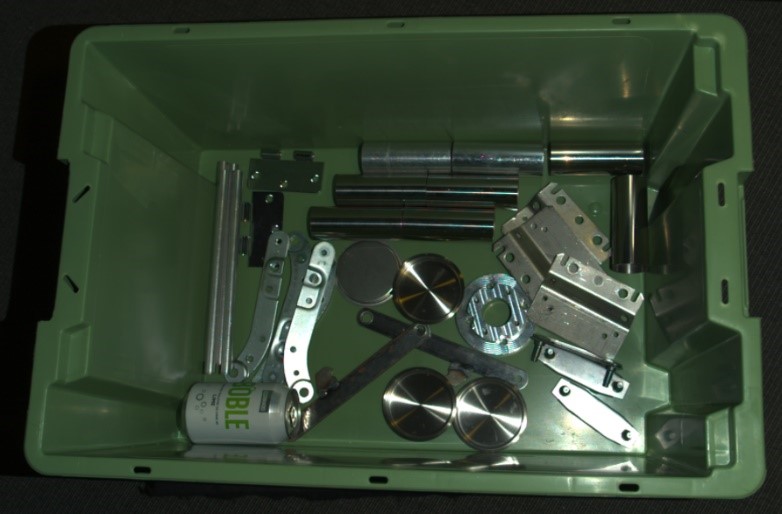
预设: 工业 涵盖了在无序抓取、机器操作和装配操作中常见的所有类型物品,包括不同大小、形状、颜色和材料的物品,它们可能是光亮和高度反光的。通常,这些零件会随机放置,但每个容器只包含一种类型的零件。在这种情况下,高精度是关键考虑因素,因为通常会有金属零件使用刚性夹具进行拾取,点云的准确性必须非常高,以确保零件可以被稳定可靠拣选
支持Zivid 3D 相机:
预设: 散射 这适用于相对简单的场景,动态范围有限,反射较少,例如暗淡的、哑光金属零件,或相反,哑光橡胶管道。

典型工业场景: 散射设置下的点云场景
设置: 高反射 用于具有高度反射零件和/或小而详细的具有挑战性的场景,例如M5螺栓。在这里,捕捉时间的重要性次于以高精确度和高准确性捕获零件的所有细节以及其位置和方向,以确保成功的拾取。
典型高反射场景: 高反射场景下的点云
设置: 局部反射 这是一个适用于动态范围相对广泛的物品的中间设置,其中存在反射但不会过于明显

典型工业场景: 半反射场景下所捕获的点云
Preset: 检测 非常适用于维护检查应用。此类典型示例可能包括检查机车底盘的磨损情况、检查焊接接头或汽车和白色家电生产中的接线连接。检查过程不需要高速,但绝对的点云质量和完整性至关重要。捕捉时间通常在1000毫秒到3000毫秒之间。
支持Zivid 3D 相机:
设置: 默认 ( Zivid 2+)适用于具有高动态范围的反射部件的场景。
设置: 细微细节(Zivid 2+) 适用于非常小的细节和需要最丰富、最详细的点云来揭示非常小的特征和物品的部件,例如电子印刷电路板(PCB)的检查。.
设置: 近距离 ( Zivid 2 and Zivid One+) 适用于工作距离约为35厘米的情况。
设置: 远距离 (Zivid 2 and Zivid One+) 适用于工作距离约为60厘米的情况。

典型检测场景: 默认/远距离设置下的点云场景
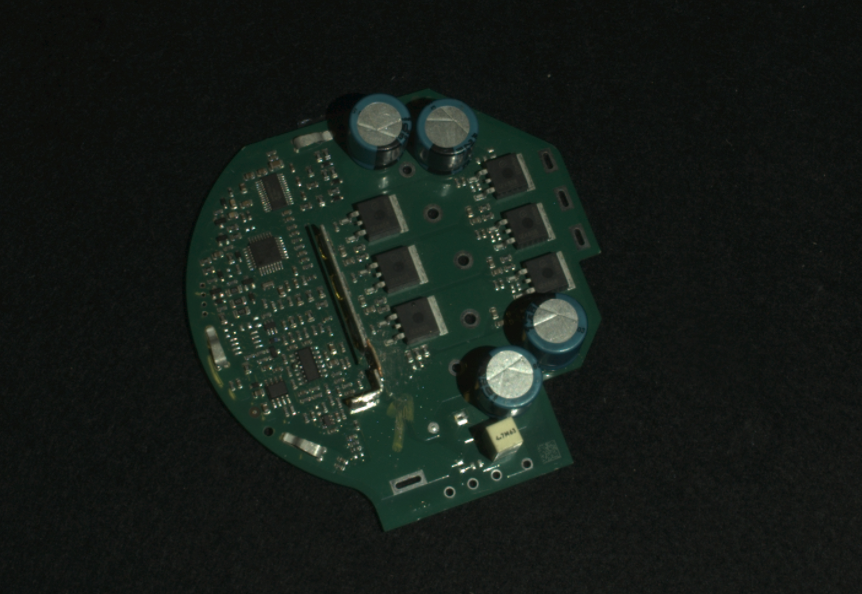
典型检测场景: 微小细节/近距离设置下的点云场景
探索通过应用预设功能捕获的点云数据
在 Zivid, 我们相信 ‘吃自己的狗粮’, 这是早期软件工程领域广为流传的一句名言。基本上,如果你认为产品对你的客户足够好,那么它也应该在内部得到好评。在这方面,我们的工程师通常从预设开始,然后进行成像研究和测试。如果您想探索我们使用应用程序预设创建的示例点云的范围,请查看。 这里。
总结
开始学习总是充满波折,而3D机器视觉可能会呈现出相当陡峭和令人生畏的学习曲线。迅速获得良好的结果会极大增强信心和热情,从一开始就获得出色的结果会让您相信自己可以实现目标,您可以相信所使用的工具可以实现自己的工业目标。而且,这意味着您会更享受这个过程,创新也应该是有趣的,对吗?
在Zivid,我们真正坚持插即用的理念。只需将3D照相机插入,就能轻松获得出色的点云数据,几乎不需要任何努力。这些预设的设计目标是让我们更接近实现这一目标。
我们相信您会发现新的预设对快速入门并立即得到高质量结果大有益处。我们相信总的来说,它们会为您提供干净的点云捕获结果,使您可以立即开始处理数据。但当然,除了易用性,您还希望其具备灵活性,因此您可以使用完整的滤镜和工具来进行进一步的微调。希望您会喜欢这个预设功能。

Zivid 2+ 3D相机解决自动化拣选挑战
%20(Blog%20Banner)%20(4).png)
自动化装配应用中的5个关键机器视觉要点