

In this short beginner’s guide, we will focus on how to successfully use 3D vision in logistics, e-commerce, manufacturing, and automotive. Get tips for choosing the ideal 3D sensor for your application and start programming right away with concrete technical tools.

Know your industry
To start enabling your 3D vision system, you first need to grasp the challenges of your industry and how 3D machine vision can solve them. Let’s dive into logistics, e-commerce, automotive, and manufacturing.
Logistics
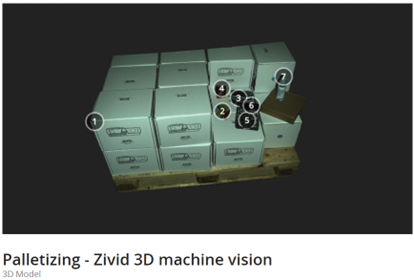
Logistics is a high-paced real-time operation with multiple boxes, parcels, and packages moving quickly through logistics facilities. It is a very unpredictable situation with no prior knowledge of what will arrive and needs to be sorted and sent to its destination. These demands necessitate a highly adaptable and intelligent 3D vision camera that recognizes what it sees and fastens the process of differentiating between items.
Common items handled in logistics are cardboard boxes in different sizes and shapes. This could be difficult for your robot to pick a box if they are all different and tightly packed together. You need a high-quality 3D sensor to see the corners of the boxes accurately. Here is an example of a typical point cloud captured by a Zivid 3D camera:
Manufacturing
The manufacturing industry is a playground for innovation. Companies are trying to make up for the shortage of skilled workers with various automated applications, from pick-and-place to inspection.
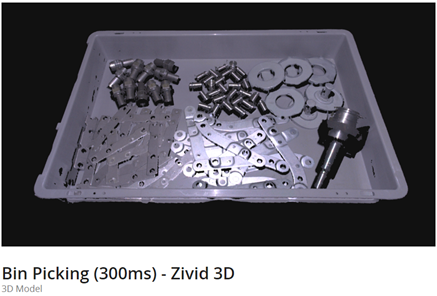
As you usually work with a broad range of parts, you will most likely come across some extremely small, difficult-to-grasp, or even light-absorbing items, making the task difficult for a vision system. In this context, high-level 3D vision is a necessity to meet customers’ expectations for cycle times and pickers per minute. At Zivid, being able to capture shiny metallic parts is one of our priorities. Here is an example of a typical point cloud captured by a Zivid 3D camera:
E-commerce
The e-Commerce industry has rapidly expanded over the past few years due to the surge of online shopping. Previously labor-intensive online retailers have now begun investing in automation to achieve high efficiency and ensure reliable throughput.
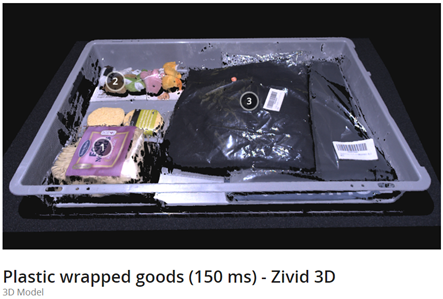
In a typical automated warehouse, your 3D camera will need to handle a wide range of random objects in different shapes, sizes, and colors. Plastic-wrapped items, in particular, are a real challenge. Here is an example of a point cloud of various items, including plastic ones, captured by a Zivid 3D camera:
Automotive
The automotive industry has a history of early adoption of automation with robotics. However, there remain many complex operations that have continued to require human effort due to the high levels of accuracy needed and hard-to-predict variations in task demands.
Just like in manufacturing, it is most likely that you will encounter reflective metallic parts in various applications, which can be a headache. You need a 3D camera that can meet today’s demand for automating manufacturing processes, such as production, quality control, and pick and place. Here is an example of typical shiny parts used to build a car captured by a Zivid 3D camera:

Choose your 3D camera
Now that you have a clear idea of the challenges you are facing in your industry, it is time to choose your 3D camera. Of course, we are partial here and will tell you to trust Zivid for the job. But as it is your choice and yours only, here are some tips for comparing different sensors and choosing accordingly.
Compare point clouds
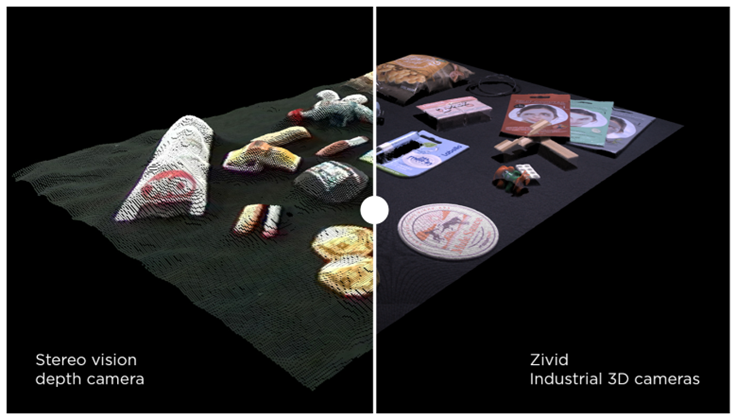
A 3D point cloud is the digital representation of our reality produced by a vision sensor. It's this point cloud that your system must use as input when calculating how to perform changes in the real world. We have shown before some point clouds we took in different use cases. One way for you to evaluate sensors is to compare point clouds of the same scene. For example, here is a comparison of a scene captured with a stereo vision camera vs. a Zivid camera:
Compare technical specifications
3D cameras have various features. You need one that works well with the type of parts and robot you are working with. Depending on your application, you might need a sensor with a specific operating distance, accuracy, spatial resolution, etc. Here is, for example, a comparison of our two latest cameras, the Zivid Two M70 and L100.
|
Zivid Two M70 |
Zivid Two L100 |
| Applications | |
|
Key applications: Robot Guiding, Assembly, Mobile inspection Works well with Suitable for |
Key applications: Bin picking, machine tending, item picking in logistics Works well with Suitable for |
|
General Specs |
|
|
Structured light 3D technology 169 x 122 x 56 mm IP65 3D HDR 0 - 40 °C operating temperature |
Structured light 3D technology 169 x 122 x 56 mm IP65 3D HDR 0 - 40 °C operating temperature |
|
Operation Distance (mm) |
|
|
Focus distance Optimal working distance³ Recommended working distance Field of view Spatial resolution Per distance (z) |
Focus distance Optimal working distance³ Recommended working distance Field of view Spatial resolution Per distance (z) |
|
Accuracy |
|
|
Point precision Planarity trueness Dimension trueness error |
Point precision Planarity trueness Dimension trueness error |
You can get a full comparison of all our products here.
Dive straight into programming
Here we are, finally. The nerdy, technical stuff you need to start integrating your camera into your system! Here we give you a summary of what we have in our ebook “a beginner's guide to 3D robot vision”.
The importance of Hand-Eye Calibration
Hand-eye calibration is used to relate what the camera (“eye”) sees to where the robot arm (“hand”) moves. Check out this video where we perform hand-eye:
Eye-in-hand calibration is a process for determining the relative position and orientation of a robot-mounted camera with respect to the robot’s end-effector. It is usually done by capturing a set of images of a static object of known geometry with the robot arm located in a set of different positions and orientations.
Eye-to-hand calibration is a process for determining the position and orientation of a statically mounted camera with respect to the robot’s base frame. It is usually done by placing an object of known geometry in the robot’s gripper. Followed by taking a series of images of it in a set of different positions and orientations.
At Zivid, hand-eye calibration is super important. We have written a series of tutorials for you to set up your calibration tests. Learn more here.
Code samples to get started
Dive straight into programming your camera with your preferred programming language. We have created a full list of samples, installation walkthrough, and more to program a Zivid camera with C++, C#, Python, HALCON, MATLAB, and ROS.
Want to get the full toolbox to get started with 3D vision? Download our beginner’s guide with tools to successfully use 3D robot vision:

Unlocking the Full Potential of Bin Picking with the Right 3D Camera
Learning the basics: 3D Machine Vision Software
