

Picking an object from a bin and placing it on a desired location sounds trivial, right? Well, what happens when you want to automate this trivial task?
Bin-picking is a robotic application widely used in industrial automation environments. A typical bin-picking process using a 3D depth camera includes these three steps:
- Detect
- Pick
- Place, e.g., placing parts to the desired location on a feeder, conveyor, or sorter for further processing in the plant.
Performing random bin-picking is still a challenge in the world of robotics. Even for large manufacturers, adoption of bin picking stations is low, and at SMEs, the number is still close to zero, according to The Robot Report. The difficulty stems from the inherent uncertainty in physics, perception, and control. This article covers three major challenges with bin-picking and how the latest 3D machine vision technology can solve them.
Challenge 1. Tiny, densely stacked, or randomly arranged objects
Small, randomly arranged objects pose a significant challenge in automated pick and place applications. Objects are challenging to distinguish, and details needed to reliably detect and safely pick the object can easily become one big blur. To overcome these challenges, you need a 3D vision system with high dynamic range, high resolution, and precision. Finally, your 3D camera must provide a true-to-life representation of the captured objects. True-to-life, or trueness, is important for picking objects, as low trueness error means less scaling- and transformation errors.
With the industrial Zivid 3D cameras, resolution, precision, and trueness are optimized, you can capture both the fine details reliably for large parts as well as the tiny and thin objects. A short baseline minimizes occlusion, and the patented HDR technology ensures that both the dark and highly lit part of the scene is equally well captured as you can see in the point cloud example below. Zivid Two touts <0.2% trueness error, so you can safely calculate the correct gripper- and picking positions.
.jpg?width=1205&name=Random_metallic-1%20(1).jpg)
Point cloud example with Zivid Two (View in 3D)
Challenge 2. Shiny, reflective, machined, and polished parts
Getting good 3D data on reflective and shiny objects is a challenge in many bin-picking solutions. Reflections and inter-reflections cause distortion and anomalies in point clouds. You will often see heavily distorted point clouds with floating groups of points and randomly scattered noisy points when imaging reflective parts as polished metallic cylinder or washers in traditional systems.
The consequence of these anomalies is that the system cannot reliably detect the objects. For instance, data quality is not good enough to do CAD matching, or that the picking fails because of faulty calculated picking positions.
With the unique and patented Artifact Reduction Technology (ART), the Zivid 2 3D camera is specifically designed to handle reflections, allowing you to handle most reflective scenes confidently.
.jpg?width=1462&name=Shiny%20objects%20(1).jpg)
Point cloud example with Zivid 2 (View in 3D)
Challenge 3. Experience fewer occlusion outliers
A wide camera baseline or just bad camera placement can cause the occlusion problem by shadowing bin edges and potentially hiding small objects in the bin. It means that your vision-based robot may miss some ‘hidden’ items at the corner of the bin due to the loss of scene details.
The Zivid 2 is an ultra-compact depth sensor, and with a small baseline and more optimal occlusion performance than larger baseline cameras and scanners. A large baseline gives excessive projector/camera shadowing and loss of scene details, creating holes and missing data affecting the detection. There is also a risk of missing smaller objects hidden by shadows in the bin, for example, close to corners and edges, especially when picking from smaller boxes.
What to read next → Key considerations for choosing the ideal camera for bin picking
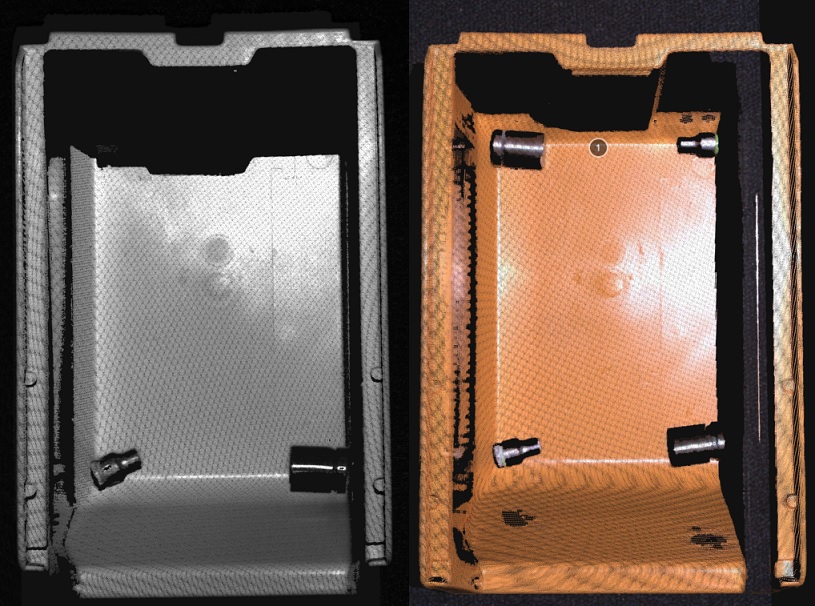
Occlusion by bin edges; left image captured with a laser system (large baseline), right image is with Zivid Two. Objects in the corner are hidden for large baseline vision systems.
With 2D or low-cost 3D alternatives available on the market, automation developers should consider the three major bin-picking challenges before choosing a system that is not optimized for industrial robotics applications. When robots can see more, they can simply do more. With industrial 3D vision from Zivid, your system sees the required details with minimal errors and uncertainties at exceptional speed - which means that your robots can empty the bin faster, with a reduced number of mispicks.
Do you want to learn more and unlock the potential of your bin picking solution? Read our eBook about 3D vision with bin picking:

The new 3D vision tools enabling bin-picking automation
The best way to mount your 3D machine vision sensor
