.svg "Zivid")







SDK 2.11 强调简化流程和提高与 Zivid 3D 相机的网络连接效率。这会进一步提高数据传输效率,以减少捕获时间。一如既往,还有一些其他的功能,下面让我们开始吧。

没有时间阅读全部? 看下面视频:
与隐藏设备或无法连接的设备有关的网络问题非常令人沮丧。通常解决方案就只能是将设备连接到网络,找到设备并重新连接。因此,我们在与 Zivid 以太网相机的网络功能上加入了更多的技巧。现在,当 Zivid 3D 相机连接到网络时,会被发现并可见。这台3D相机被标识为可连接或不可连接。如果它不可连接,这往往是由于重复的IP或位于不同子网的原因。
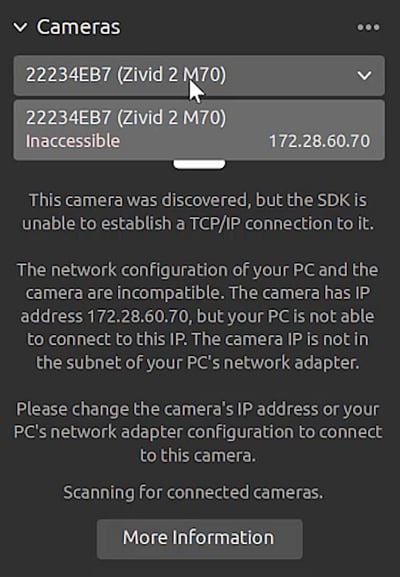 在Zivid Studio中检测配置错误的Zivid 2+相机的示例
在Zivid Studio中检测配置错误的Zivid 2+相机的示例
此升级使您能够查看相机,然后重新配置它以使其可连接。这一功能在SDK和Zivid Studio中均可用。NetworkCameraConfigurator 工具允许进行IP重新配置,并且现在可以接受相机的序列号或IP作为标识符。这使得对于即使位于不同子网上的相机,Zivid 相机的网络管理也变得简单。mDNS(多播DNS)协议用于解析IP地址和主机名,并且具有无需DNS服务器和非常简单的设置的优势。
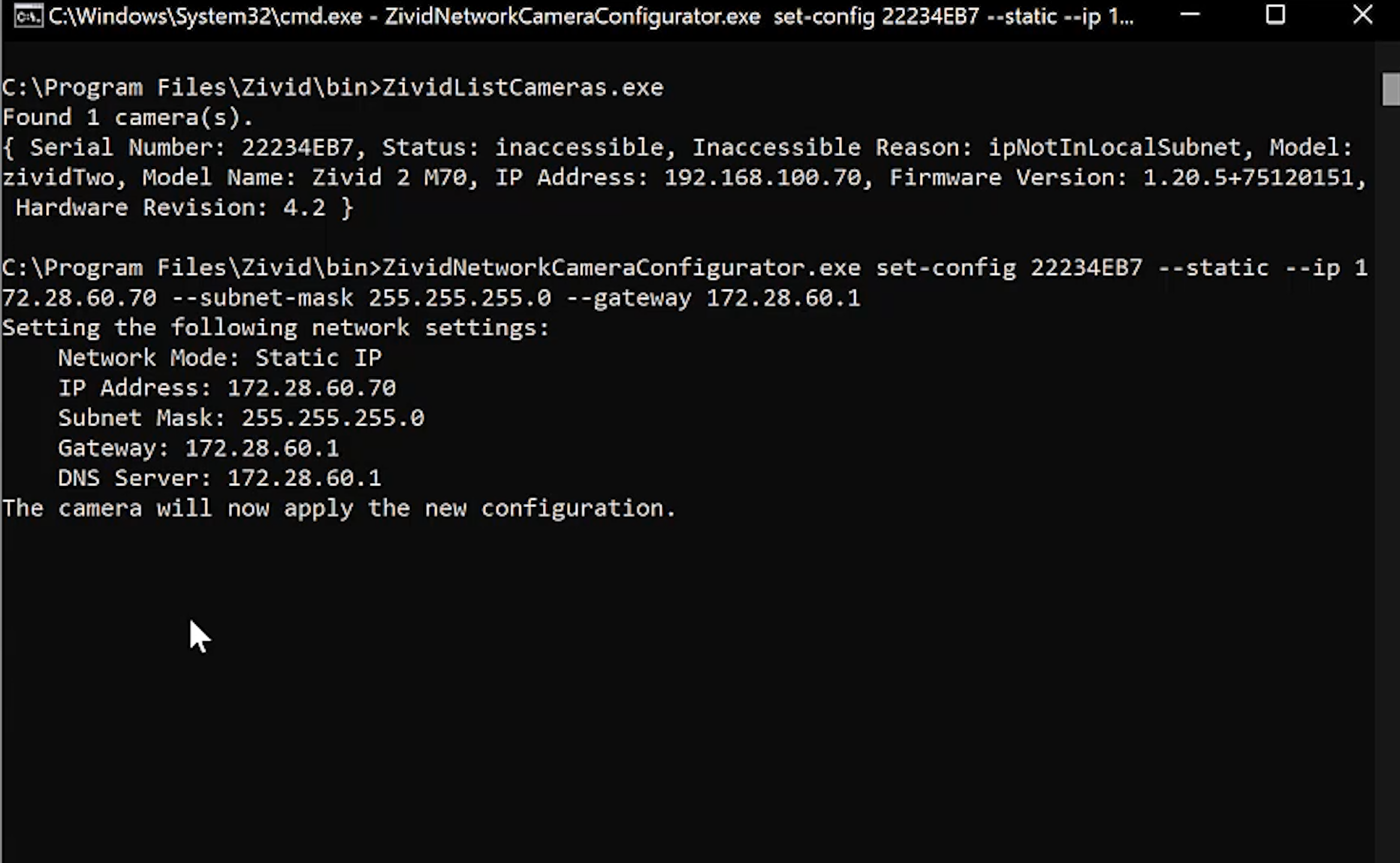 通过序列号在CLI工具中配置无法访问的Zivid
通过序列号在CLI工具中配置无法访问的Zivid
以下是不同GPU上的捕获时间基准测试概览
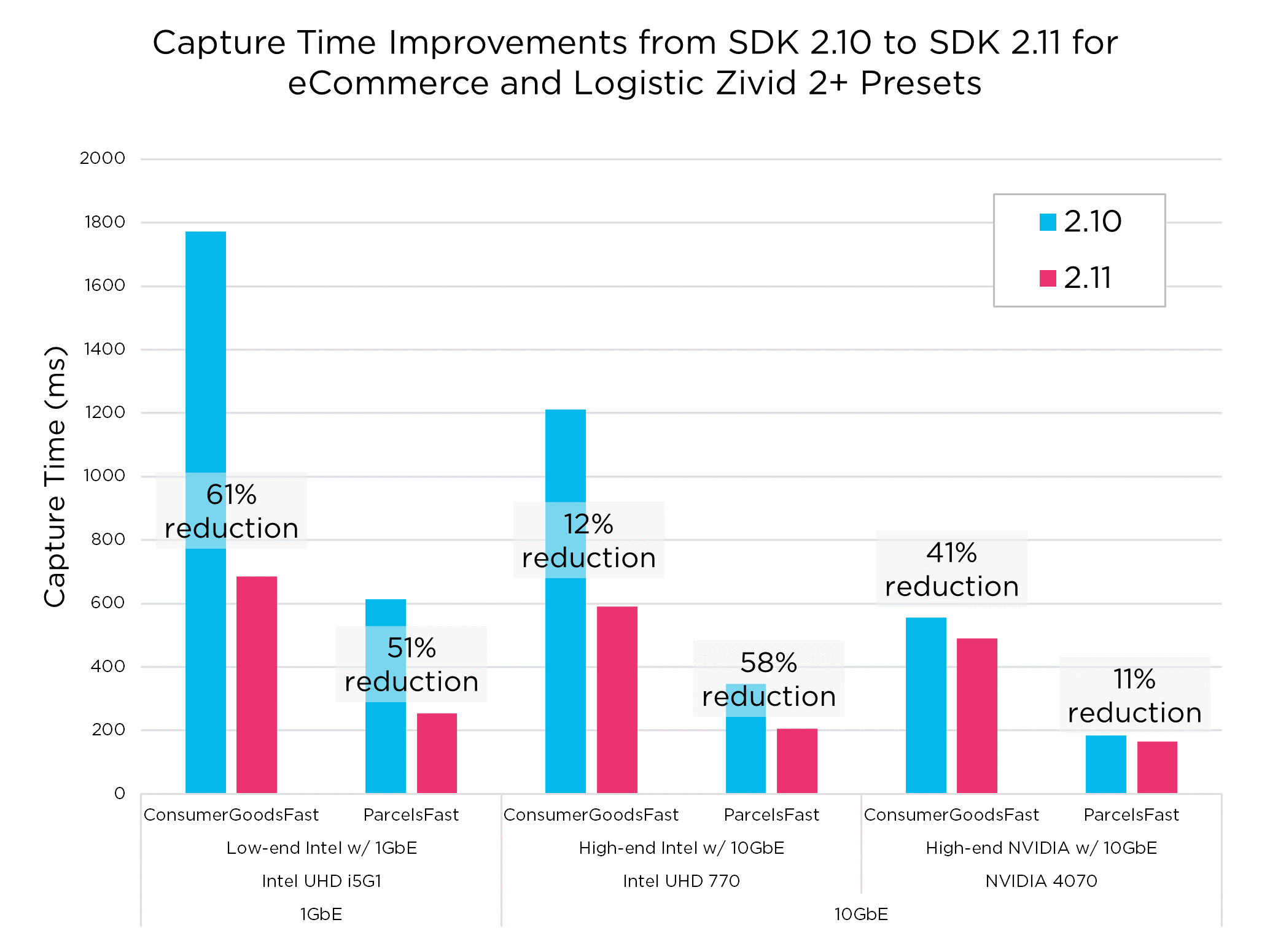 捕获时间的提高 SDK 2.10 到 SDK 2.11
捕获时间的提高 SDK 2.10 到 SDK 2.11
 全分辨率点云 (2448 x 2048 pixels)
全分辨率点云 (2448 x 2048 pixels)
 2x2 子采样电晕 (1224 x 1024 pixels)
2x2 子采样电晕 (1224 x 1024 pixels)
 4x4 子采样点云 (612 x 512 pixels)
4x4 子采样点云 (612 x 512 pixels)
进行2D和3D捕获需要多个操作。在 Zivid,我们一直专注于降低整体捕获时间。为了做到这一点,我们仔细评估捕获所需要的每个操作,并尝试找到可优化的个别领域,以减少捕获时间。通过在数据准备就绪后尽快提供这些数据,以便其他过程可以尽快开始处理,从而可以使系统更快,并减少机器视觉相关任务所需的时间预算分配。
在这个SDK中,通过实现同时进行图像采集、数据传输处理以及一些固件优化来减少时间预算。
在进行2D + 3D捕捉时,SDK将同时触发3D点云采集,与2D捕捉的传输和处理一起进行。以前,只有在2D捕捉完成后,3D处理才会开始。这个新功能在高端GPU(Nvidia)上改善了整体捕捉时间约15-20毫秒,并在中端GPU(Intel)上提高了50毫秒。另外,我们还进行了一系列固件改进,将总捕捉时间又减少5毫秒,这些改变不会对API引入任何改动。下图展示了在高端NVIDIA GPU上进行包裹处理应用的2D和3D成像的捕捉时间,比较了SDK 2.10和2.11之间的差异,其中包括调度、流水线和定时。
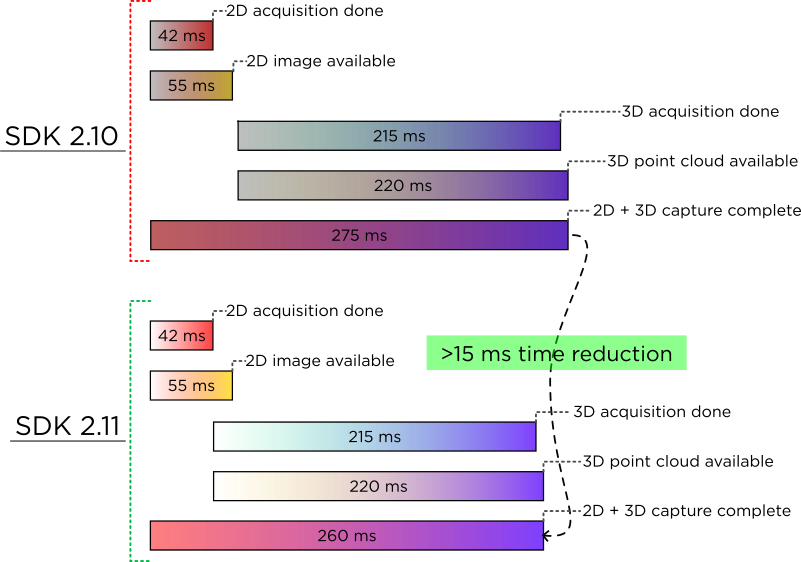 Pipeline speed improvements in SDK 2.11
Pipeline speed improvements in SDK 2.11
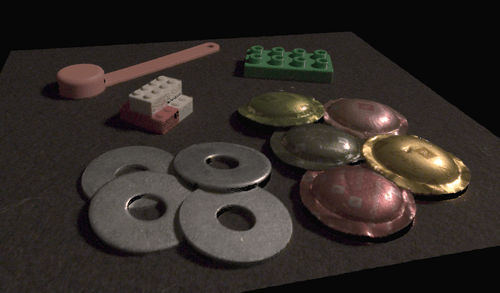
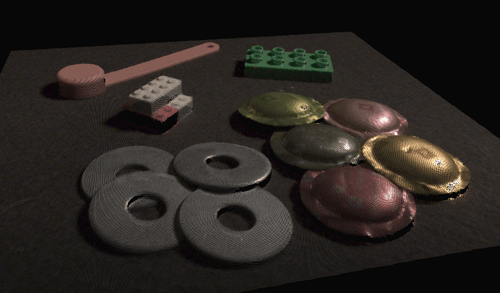
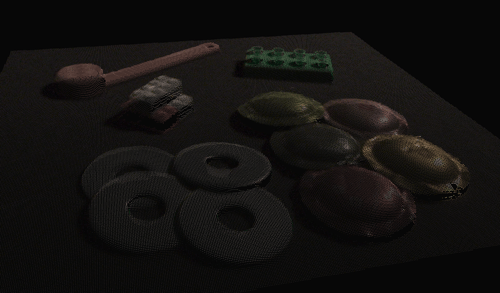
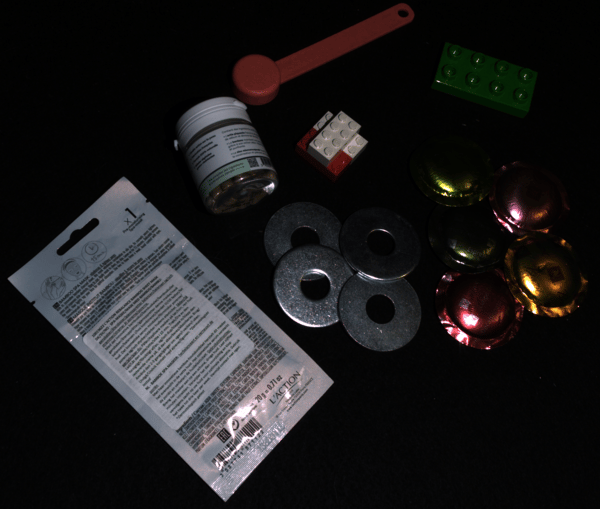
现在可以选择在8位图像中使用线性RGB和sRGB之间的选项。这旨在使用Zivid Studio进行捕获评估时提供一些帮助。颜色空间映射sRGB是Web和显示器的标准。使用sRGB颜色空间意味着显示的图像更加真实和明亮。
sRGB是2D相机中非常常见的格式,这个功能将有助于与为sRGB格式提供最佳结果的软件对齐和提高性能。这对已经用sRGB图像进行训练的许多AI算法将是有益的。预计这个功能还将有助于减少2D图像中的整体反光。
 线性RGB与sRGB的2D图像
线性RGB与sRGB的2D图像
 线性RGB颜色空间的2D图像
线性RGB颜色空间的2D图像
 sRGB颜色空间的2D图像
sRGB颜色空间的2D图像
在Zivid,提高捕获速度和易用性是一项永远不会结束的工作,总有一些可以做的事情来改善这两个重要方面。因此,你会在我们的SDK发布中经常以这两个目标主导。但在这两个高层次的客户目标背后,我们的工程师们正在多个方面进行广泛而深入的改进攻克这一挑战。SDK 2.11中的功能改进有望提高10-300%的捕获时间,我们相信这对我们的客户来说是一份令人欣喜的圣诞礼物。
圣诞快乐! 愿您喜欢Zivid的最新开发




No Comments Yet
Let us know what you think