From simulation to stitching, this SDK release brings some features and improvements for developers and robotic system engineers:
- Nvidia Isaac Sim extension
- Simplified point cloud stitching
- Cleaner data with Omni engine
- New compact calibration board
- Faster filter tuning

No time to read? Just watch our video to get all the highlights of this SDK:
Zivid Extension to Nvidia Omniverse
NVIDIA Omniverse is a powerful platform for real-time simulation and collaboration in 3D workflows. Built on top of it, Isaac Sim provides a robotics-focused environment for designing, testing, and training robots in virtual scenes, including sensors, perception, and motion planning.
With SDK 2.16, we’re releasing a Zivid extension for Isaac Sim that enables seamless integration of Zivid 2+ and 2+R cameras into simulation workflows. Using this extension, you can:
- Add physical 3D models of the camera and accessories to your virtual environment
- Synthesize images and point clouds from the Zivid cameras' field of view with correct intrinsics
Which allows you to:
- Run function simulations of your robot with Zivid cameras
- Faster cell design iterations, prototyping, initial testing, and verification
The extension will be available later this week. Download it from our GitHub repository and start testing! Once downloaded, it is available via the Isaac Sim GUI Extensions menu and through scripting for automated workflows.
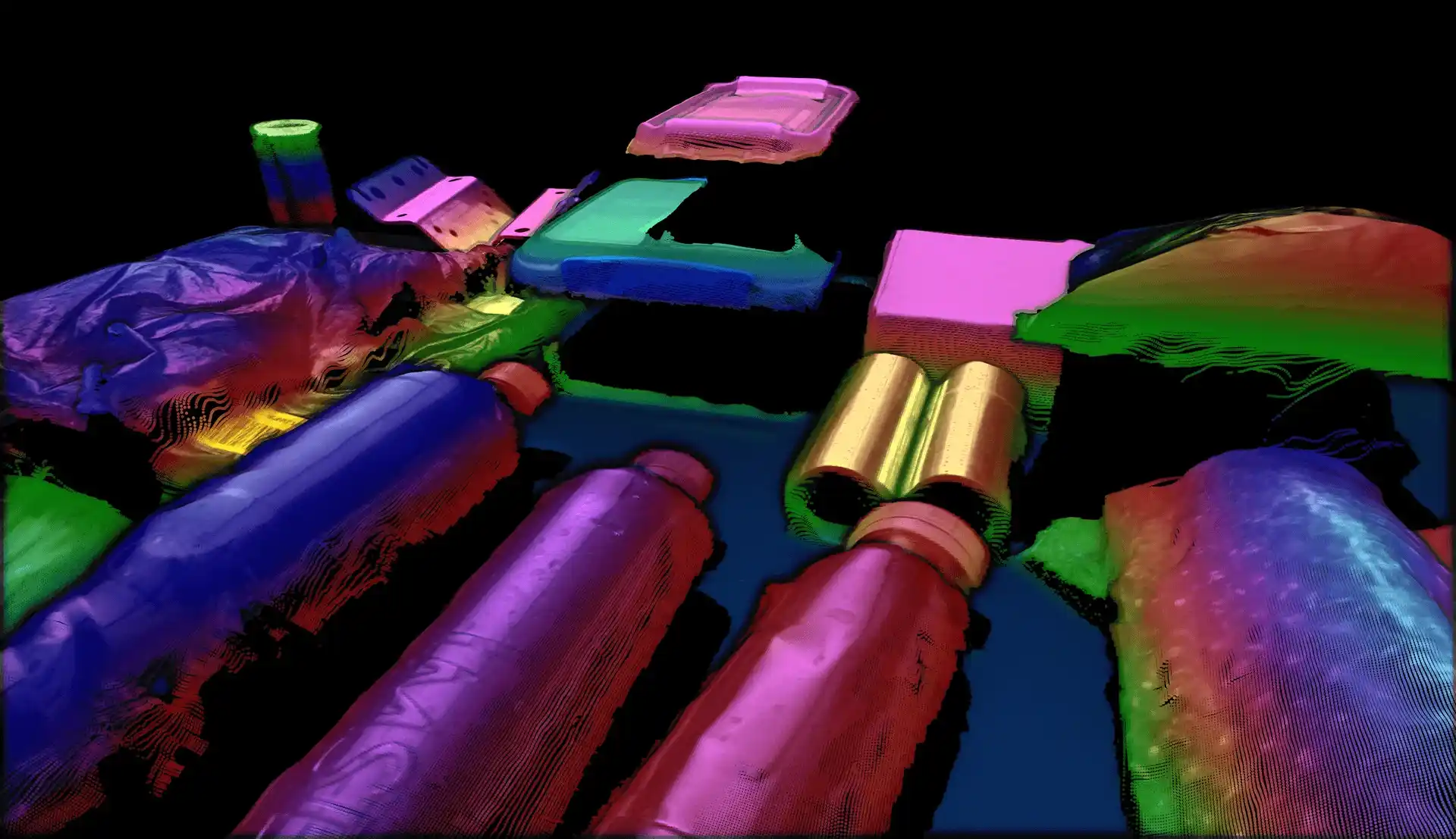
Simplified point cloud stitching with UnorganizedPointCloud
Applications, such as surface finishing, welding, additive manufacturing, and inspection, may require combining multiple point clouds into a single, unified dataset. This process, known as point cloud stitching, is essential for reconstructing large or occluded surfaces. But stitching can be tedious and error-prone without the right tools.
To streamline this workflow, we introduce a new class: UnorganizedPointCloud. It enables developers to efficiently and elegantly stitch point clouds for tasks like volume estimation, full-surface inspection, or combining scans from multiple viewpoints.
Key features:
- Create an unorganized point cloud
- Add more points to the point cloud
- Downsample and refine the point cloud to reduce file size and eliminate redundant points
- Compute a centroid that represents the middle of the point cloud
- Apply a rigid transformation, including your transformation or transform to the center
We also added functionality to align overlapping points between two unorganized point clouds.
With this class, we offer the tools needed to implement robust point cloud stitching for any application.
Cleaner point clouds with Omni engine
For a robot to successfully pick items from a bin or pallet, it requires clear and collision-free paths guided by accurate 3D data. However, reflections and floating points above the bin make path planning and collision avoidance challenging, leading to mispicks or failed path planning.
With SDK 2.16, we introduce a local reflection filter for the Omni Engine. This filter enhances robustness in the presence of challenging reflections and prevents points from being incorrectly snapped to the background or mixed up with foreground objects. The result is cleaner and more reliable point clouds.
While the filter may reduce point cloud coverage in some cases, it significantly improves robustness when using the Omni Engine. If you want to read more, check out the updated reflection filter article on our Knowledge Base.
Before and after using the local reflection filter for Omni Engine.
New smaller calibration boards
We introduce a new compact calibration board, supported in SDK 2.16.
The new boards are ideal for hand-eye calibration and infield correction for close-range applications. With dimensions of just 12.5 × 15 cm, it’s easy to permanently mount directly on a robot or inside a cell, making calibration more accessible and convenient.

With dimensions of just 12.5 x 15 cm, it makes camera calibration more accessible and convenient, as you can permanently mount the board on the robot or in the cell.
The new board is fully compatible with Zivid accessories, and we recommend using it with MR60 and M60 cameras.

You can order them now at Zivid shop today! We will start shipping in September.
Re-process without capturing
Tuning filters can be a time-consuming and frustrating task, especially when every small adjustment requires a new capture. This makes it difficult to isolate the effect of a specific filter and slows down development and debugging.
With SDK 2.16, we’ve enabled re-processing of existing point clouds inside Zivid Studio. This means you can now tweak filter parameters—like cluster, noise, or smoothing—and instantly see the impact without having to recapture.
This not only speeds up filter optimization but also makes it easier to understand how each filter works, allowing you to debug point cloud artifacts more effectively.
Summary
That’s it for SDK 2.16! This release brings a solid set of improvements across simulation, point cloud processing, calibration, and developer experience. Whether you're building virtual robot cells in Isaac Sim, stitching together multiple scans, or fine-tuning filters in Zivid Studio, SDK 2.16 helps streamline your workflow. For full details, check out the Changelog and as always, we’d love to hear your feedback!

Zivid SDK 2.15 Expands ROS 2 & GeniCam Support

Zivid SDK v1.6