

Your 3D vision system is performing flawlessly. Point clouds are clean, picks are accurate, and the object detection pipeline is tuned. Then your robot arm swings into a retract move, clips the pallet corner, and brings the whole cell to a fault stop. You've been there. Every automation engineer who has lived through a depalletization commissioning has a version of this story.
Adding motion control (a dedicated motion planning layer that sits between your 3D vision output and the robot controller) is the step that separates a system that works in the demo from one that runs reliably in production. But adopting motion control for a depalletization cell introduces its own set of decisions, constraints, and failure modes. Here's what you actually need to think through.
Learn more about Zivid Motion →
The gap between perception and execution
Most engineers who've deployed 3D vision understand the vision side of the problem well: camera placement, working distance, capture parameters, point cloud quality. What's less intuitive is what happens after the pick pose is generated. Your robot doesn't just need to know where to go. It needs a reliable, collision-free path to get there, a safe retract trajectory, and a way to navigate back to home without clipping a leaning box on layer three.
Traditional depalletization setups handle this with hand-coded waypoints: a programmer defines a series of fixed intermediate positions that guide the robot around the pallet structure. This works reasonably well for single-SKU, uniform loads. The moment your pallets start arriving with mixed case sizes, varying stack heights, or shifted layers, those hardcoded waypoints become a liability. The arm tries to execute a path that was valid for a full pallet but is now wrong for a half-depleted one.
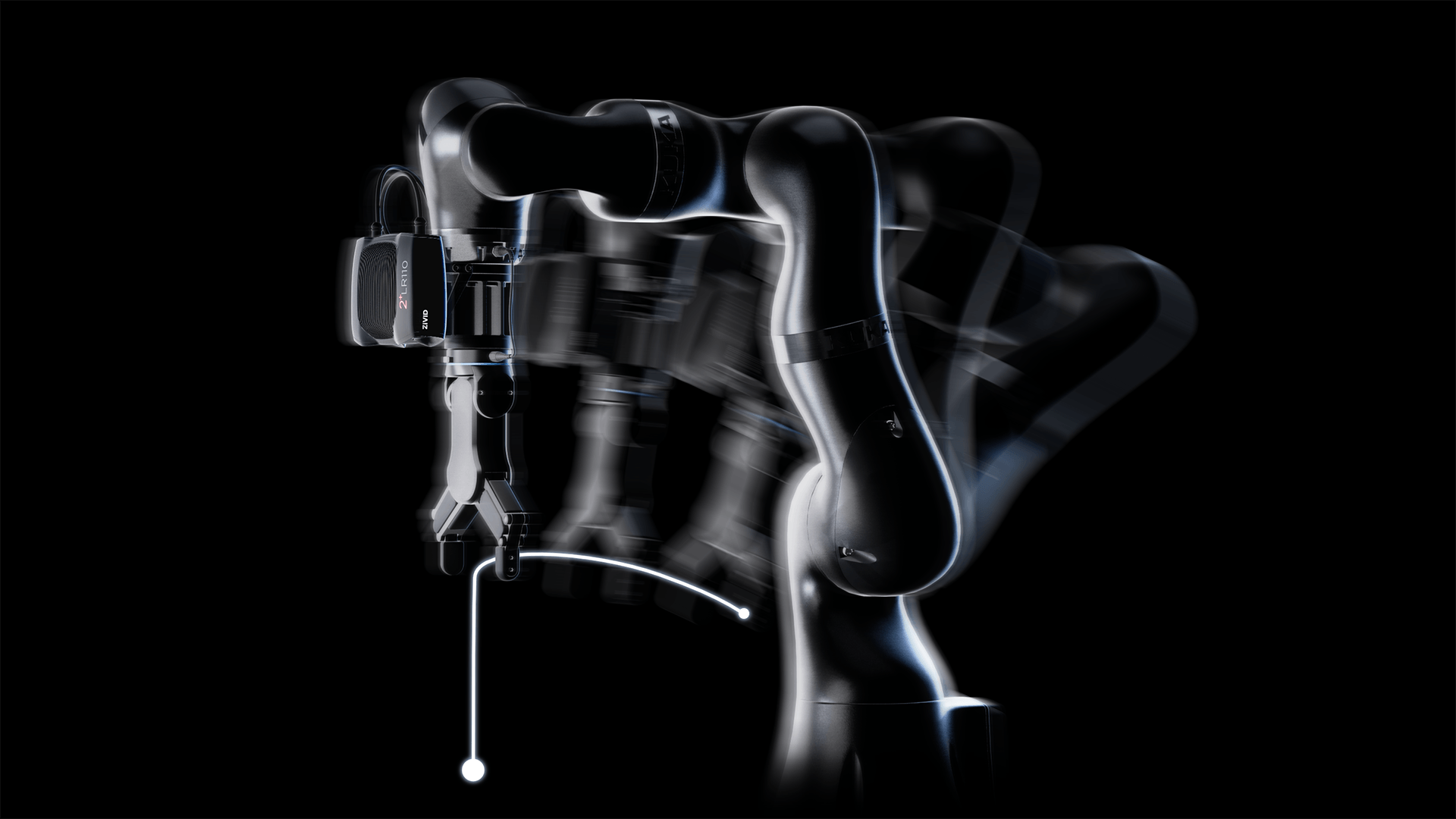
Motion planning replaces fixed waypoints with a computed path generated fresh for every pick, accounting for the current state of the cell, including the pallet, the robot's own body, and any objects in the gripper. This is the fundamental shift in how you think about robot motion for depalletization.
Challenge 1: Collision avoidance when the environment changes every cycle
Depalletization is one of the hardest environments for collision modelling. The obstacle geometry changes with every single pick. A box that was stable on layer four becomes unsupported after the one beside it is removed. The robot's approach angle to the next target may now pass through space that was clear thirty seconds ago.
The solution requires a motion planner that can update its collision model from real-time sensor data, not just a static CAD representation of the cell. In practice, this means feeding point cloud data from your 3D camera directly into the planner's environment model after every capture, so the path computed for pick N+1 reflects the actual state of the pallet after pick N.
Zivid Motion, Zivid's deterministic motion planning software announced in early 2026, is built around exactly this principle: it updates collision models from CAD files, meshes, and live point clouds in real time, then recomputes paths on that updated model. The result is a planner that stays synchronised with the physical world rather than operating on a frozen snapshot from commissioning day.
Zivid Motion in action with full-body collision checking.
There is also the gripper to consider. Once your robot has grasped an object, it effectively becomes wider, taller, and heavier. Many other planners are not inherently designed to take the picked object into account; this can lead to considerable problems when deployed and may have an overall performance impact. Zivid Motion dynamically incorporates the grasped object into the robot's collision model during the retract move, which matters enormously when pulling a large case backward through a narrowing gap between the remaining stack and the cell guard.
Challenge 2: Planning latency and its impact on cycle time
Cycle time in depalletization is not just a function of how fast the robot moves. It's a function of the total time from the end of one pick to the start of the next, which includes: 3D capture, object detection, pick pose selection, motion planning, execution, and retract. If your motion planner takes two or three seconds to compute a path, that latency compounds across hundreds of picks per shift.
Sampling-based planners like RRT and its variants are flexible and widely used, but their stochastic nature means planning time is non-deterministic. You might get a path in 200 ms on one pick and 2.5 seconds on another, depending on the configuration space available. For production environments where throughput commitments have been made to operations, this variability is genuinely problematic.
You cannot predict your cycle time, and you cannot guarantee your throughput of SLA. Deterministic planning addresses this directly. Zivid Motion generates executable paths in under 100 ms, consistently, even in constrained and cluttered environments — not as a best-case figure but as a design target. This predictability is what allows you to model throughput accurately during system design, and to meet it reliably in production. In internal benchmark testing with mixed-SKU scenes, Zivid Motion produced an executable path in under 100 ms on more than 99% of picks, with worst case of 350 ms.
Challenge 3: Singularities and unexpected fault stops
If you have deployed industrial 6-axis arms in depalletization, you will have experienced singularity-related fault stops. Singularities come in various flavors and affect different joints of the robot; they can occur at the robot’s wrist, shoulder, etc. At the moment this occurs, the controller cannot compute a valid joint solution, and the controller stops the robot – often with high joint velocities immediately before the stop, which over time causes mechanical wear on wrist and shoulder joints.
The conventional workaround is to program approach vectors carefully at commissioning, avoiding configurations that pass near known singularities. This works until the pick pose changes, which in mixed-SKU depalletization, it does constantly. Pick poses that were safe for boxes of one height may route the arm through a wrist singularity for taller items.
A motion planner that is singularity-aware computes paths that respect joint limits and avoid singular configurations as a constraint, not as a post-hoc check. The practical outcome is that your operators stop seeing unexplained fault stops mid-shift, and your maintenance team stops getting called out for what turns out to be a motion geometry issue masquerading as a hardware fault.
Challenge 4: Calibration drift over time
Calibration establishes the geometric relationship between your 3D camera and the robot's coordinate system. It is the foundation that everything else depends on. If it drifts (due to thermal expansion, vibration, or a camera bracket that shifted during maintenance access), your pick poses become systematically offset, and your miss rate climbs.
Depalletization cells near loading bay doors are particularly vulnerable. Ambient temperatures can swing 10 to 15°C across the day, and camera mounting hardware that was rigid at 15 C may have expanded slightly by mid-afternoon in summer. This can be enough to push miss rates from 1% to 5% on tightly packed SKUs. Zivid’s 3D camera hardware is built for inherent thermal stability at the optomechanical level. But the real differentiator is the in-line verification workflow: Zivid Motion can run a 30-second calibration check against a Zivid calibration board, and either flag drift before it impacts production, or update hand-eye calibration. Customers who have integrated these procedures at their sites report effectively zero calibration-related downtime over 12+ months. The Zivid Knowledge Base provides structured guidance for verifying calibration accuracy and detecting drift before it affects production.
The practical recommendation is to build a calibration verification step into your startup routine — a known reference point that the robot visits and measures against the camera's output before the cell enters production mode. If the residual error exceeds your threshold, recalibrate before accepting pallets. This five-minute investment at the start of every shift has saved many sites from hours of mispick-driven downtime.
Challenge 5: Scaling across sites and cells
One of the underestimated problems in motion control adoption is what happens when you commission your second cell. Every parameter you tuned for cell 1 — the approach clearances, the retract heights, the collision buffer zones — may need revisiting for cell 2, because the physical layout differs by 80 mm on one side, or the conveyor runs at a slightly different height.
Zivid Motion aims to simplify integration where cell-to-cell variations are the reality. It does this with a cell onboarding routine: when a new cell goes online, the system can capture the actual installed geometry of its surroundings (conveyor heights, fixed obstacles, robot base position) and update the planner’s environment model. This means assumptions are replaced with real measurements. Cell-to-cell drift that historically required full re-commissioning becomes a 30-minute calibration step. For end users running depalletization cells across multiple installations, this is the difference between a 6-month rollout and a 6-week one.
Zivid Motion helps integrators to absorb cell-to-cell variations without requiring full manual re-commissioning. The system characterises the actual cell geometry rather than assuming it matches the CAD model and adapts its parameters accordingly. For end-user companies operating depalletization at multiple distribution centres, this capability significantly reduces the engineering effort required to standardise motion behaviour across a fleet.
Read our tutorial for palletizing and depalletizing on our Knowledge Base →
What the full stack looks like
A production-ready depalletization cell in 2025/2026 is not a 3D camera bolted to a robot with some waypoints. It is a layered system: a high-accuracy 3D camera capturing point clouds in under 500 ms, an object detection pipeline that identifies pick candidates and generates grasp poses, a motion planner that computes collision-free, singularity-aware paths for each pick, and a robot controller that executes those paths reliably within joint limits.
Each layer must be designed to communicate cleanly with the next. Zivid's architecture — hardware, SDK, and Zivid Motion integrated into a single vendor ecosystem — reduces the integration surface area that has historically been the source of most commissioning problems.
Zivid Motion ships as a C++ and Python SDK with native ROS 2 nodes. It works with ABB, Fanuc, Kuka, UR, and Yaskawa controllers via RTDE/EtherCAT/native driver. Inputs are: 3D point clouds(Zivid or another), CAD obstacles, and target pick poses. Output: joint-space trajectory any standard controller can execute. Typical integration time for a team familiar with 6-axis robots is 2 to 5 days for the first cell, dropping significantly for follow-up cells. Full API reference and example projects are available on the Zivid Knowledge Base.
Motion control is not an add-on you bolt on after the vision system is running. It is a core architectural decision. Make it early, choose a planner that is deterministic and collision-aware, and your cell will be easier to commission, more predictable in production, and significantly easier to replicate at the next site.
Ready to go deeper? Book a free demo for Zivid Motion:

Introducing Zivid Motion – Deterministic Motion Planning for Reliable Robotic Manipulation

Zivid SDK and Zivid Studio v1.5
