

As a year comes to an end, it's normally a good time to sit back and reflect...
However, at Zivid we decided to round off 2020 with a big splash with the availability of SDK 2.2 to keep our promise of providing continuous advancements of the Zivid 3D camera family.
SDK 2.2 has lots to offer Zivid One+ 3D camera users, including a new vision engine for troublesome reflections, a command-line tool for instantly verifying and correcting your 3D camera trueness in-field, as well as a host of Zivid Studio enhancements.
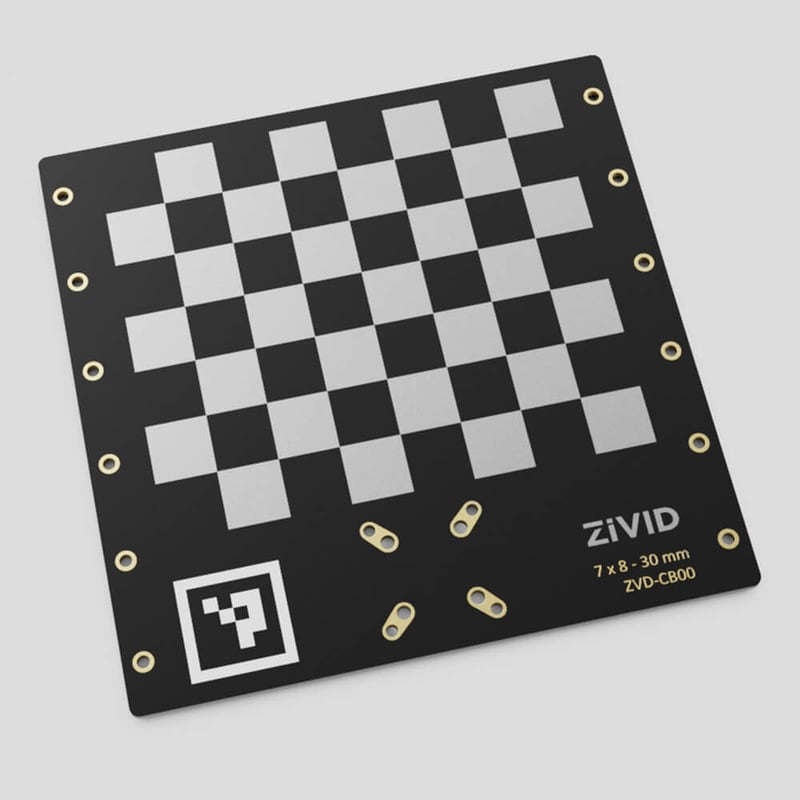
In-field correction and calibration boards.
Even if your Zivid 3D camera is rugged and designed for industry-grade operation, unfortunate situations like a drop or crash can affect the output.
Supported by dedicated Zivid calibration boards, the new in-field correction available in SDK 2.2 makes it possible to perform verification and trueness error correction.
You can use a stationary or on-arm robot setup to capture the checkerboard and instantly verify camera trueness. If necessary a correction can be computed and written to the 3D camera. Core tasks can be run without the need for additional coding.
 Here's a typical procedure using in-field correction from assembly and mounting to correction using 2 captures:
Here's a typical procedure using in-field correction from assembly and mounting to correction using 2 captures:
Zivid in-field calibration boards can be bought directly from the official webshop at shop.zivid.com.
Stripe vision engine - it's art!
Zivid's 3D color cameras use structured light technology to create high-quality point clouds. The default vision engine is "Phase". The new "Stripe" vision engine provides additional patterns and Artifact Reduction Technology (ART).
Stripe is optimized for interreflection suppression in e.g. random bin-picking applications. Besides, Stripe can be used to improve image quality when capturing point clouds of shiny or reflective objects or chrome-plated parts.
Using C++ as an example, you can specify which Zivid Vision Engine you want to use like this:
Settings::Experimental::Engine::stripe
Zivid Studio.
In addition to support for the new Stripe vision engine, Zivid Studio gets several new features.
In the information side panel you can now find point cloud settings, resolution, and capture time. If you open a .zdf-file, you can find serial number, model, and SDK version info.
Additional improvements include the possibility to adjust Gamma.
New shortcuts for faster workflows are also available. Use "Shift+I" to open the new information panel and press "M" to enable and disable meshing.
Other great stuff!
We listened to your feedback and have squashed several bugs since last time. For SDK 2.2, this includes an issue where the firmware could hang after a while, as well as a crash after subsequent exceptions thrown from capture() when using Ubuntu 16.04.
You can get SDK 2.2 here.

Zivid SDK 2.8: Meeting the Need for Speed

Reflection Removal and More with SDK 2.14 and the Zivid 2+ R-series
