

The team at Zivid is committed to providing our customers with continuous advancements of the Zivid One+ 3D camera family through frequent software updates.
In this March software release, we have incorporated a few new features and additional enhancements to the SDK.
Below you'll find more info about the SDK 1.8.1 highlights, and you can download the latest software in the downloads section.
Better 3D stitching
To make it it easier to stitch point clouds with minimal overlap, we have reduced and removed point cloud edge artifacts. When using the 3D camera's minimum FOV, or close to the minimum working distance, edge artifacts can introduce noise in the overlapping point cloud regions.
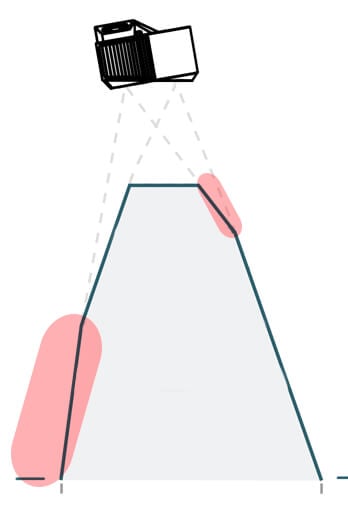
SDK 1.8.1 addresses point cloud stitching applications by removing unwanted edge artifacts.
Estimate camera intrinsics
All Zivid One+ 3D cameras come with a unique, per-camera calibration. The built-in calibration ensures that your camera captures the best possible point clouds. In applications where you want to undistort an image and use existing 2D vision algorithms, the camera intrinsic will eliminate camera calibration needs.
In SDK 1.8.1 we present a new per-frame API function where you can apply a centerpoint compensation to the intrinsics. Use this function to improve 3D to 2D projections where you want to correlate a known 3D point in space with the camera's pixel coordinate.
In this release, the function is available for C++ only, and we decided to keep the new Camera Intrinsics function experimental.
Learn more about Camera Calibration on OpenCV's pages.
Improved multi-camera support
In SDK 1.8.1 we have improved the existing multi-camera support for up to four Zivid One+ 3D cameras per computer.
In some systems, your computer hardware can limit the performance of the multi-camera setup, and you can read more about the guidelines for multi-camera systems in the knowledge base.
Additional improvements
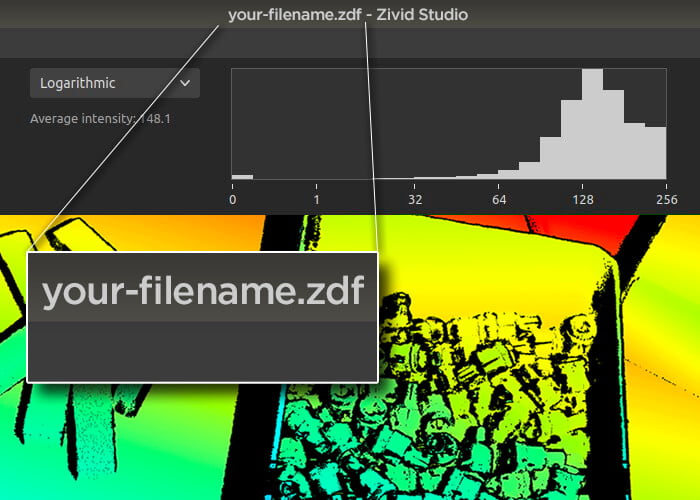
File names in Zivid Studio
To make it easier to keep track of your work, Zivid Studio in SDK 1.8.1 displays the filename of your capture in the application bar.
In addition to the above features, we have made it easier to find the software changelog and the installation guide for our Windows and Linux installers.
What's next?
Download SDK 1.8.1 or see the full list of all Zivid SDK improvements and enhancements in the online software and documentation pages.

A beginner's guide to 3D machine vision cameras

Zivid at Vision China 2021
