

- Introduction
- Why on-arm robot mounting?
Flexibility
Cost-effectiveness
Adaptability - Stationary vs. on-arm robot mounting
- Getting started with on-arm robot mounting
- Customer case study
- Conclusion
Download the full eBook for free.

Introduction
Most 3D vision sensors today are mounted on a wall, on the ceiling, or on a custom rig to capture point clouds of target objects accurately. The point clouds enable industrial robots to complete tasks in piece picking, bin-picking, assembly, and machine tending applications.
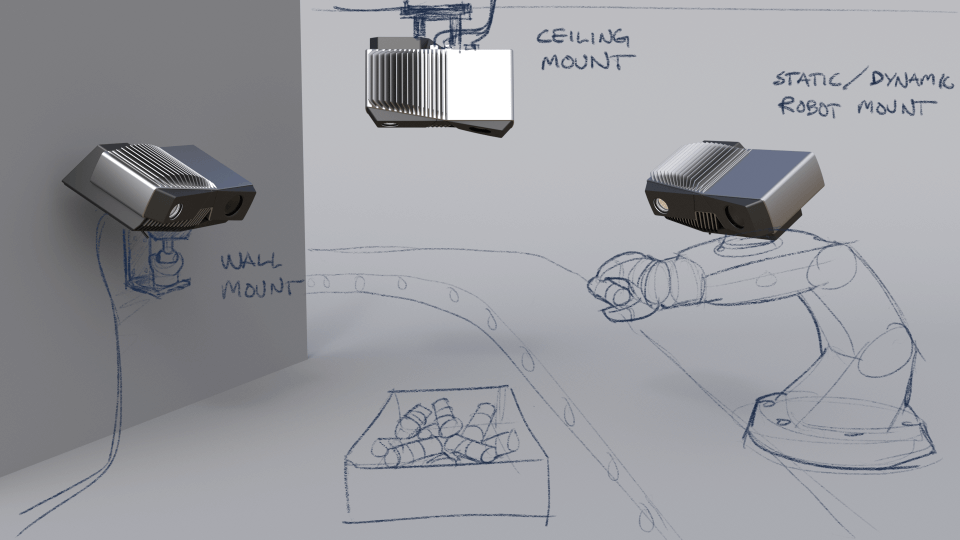
Typical stationary and on-arm robot mounted setups
Many system integrators use stationary mounting as their go-to solution for vision-guided robots. It can be easily installed with any 3D camera regardless of its size and weight.
On the other hand, attaching the 3D sensor directly to the robot arm is not as common. Even though it is not as common to mount the camera directly to the robot arm, we find that this approach can create a more flexible and effective system. Because of the benefits, end customers should reconsider how their solution can use a robot-mounted 3D camera.
In late 2020, we introduced a new industrial 3D camera, Zivid Two, to meet the increasing demand for 3D vision solutions with more flexibility, accuracy, and ease of use. One of the main advantages of Zivid Two is that it works for both stationary and on-arm mounting. It enables automation developers to use the camera in dynamic work environments while capturing point clouds of a broad range of products.

Zivid Two 3D industrial color camera
This eBook is written to help you understand the benefits of on-arm mounting and get started with 3D vision-based application development. Throughout the eBook, we will use the Zivid Two 3D camera as an example to describe machine vision techniques and use cases. You will also find links to in-depth resources to learn more about 3D vision best practice guidelines.
Download the eBook to read more.
- Learn more about on-arm benefits on zivid.com/on-arm
- Learn more about industrial 3D cameras on zivid.com/industrial
-1.jpg?width=341&height=192&name=Zivid-Two-on-arm-robotics-3D-vision-color-camera%20(1)-1.jpg)
Zivid wins gold design innovators award for robot-mounted 3D camera

A beginner's guide to 3D machine vision cameras
